

ELEV-8 V2
Link
Contents
※ 자료출처: 이 자료는 패럴렉스(Parallax.com)사의 카일 몽고메리가 작성한 온라인 자료를 바탕으로 작성되었습니다.
경고! Parallax Inc.에 의해 제공되는 정확한 부품 번호 이외의 조립 지침 또는 가이드를 사용하지 마십시오. 만약 그렇게 하면 하드웨어 오류 및 / 또는 부상의 원인이 될 수 있습니다. 또한 ELEV-8 버전 1 (# 80000) 과 버전 2 (# 80200 / # 80202) 사이에는 작지만 매우 중요한 차이가 있습니다; 버전 1조립은 지금 제공되는 조립가이드를 사용하지 마십시오.
알림! 이 조립 가이드는 비행 컨트롤러를 포함하고 있는 ELEV-8 V2 키트(# 80200)라고 가정합니다. 만약 당신이 비행 컨트롤러 키트가 포함되지 않은 ELEV-8 V2키트(# 80202)를 구입했다면, HoverFly OPEN 의 설치 및 프로그래밍에 대한 섹션은 적용되지 않습니다. 당신이 조립을 진행하는 동안 이 페이지들의 특별한 알림을 주의해서 살펴보세요!
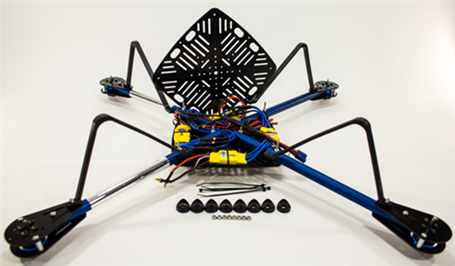
미국에서 설계되고 제작된 패럴렉스 ELEV-8 V2 쿼드콥터입니다.
이 안내서는 아홉 섹션으로 구성되고, 독립된 서른 아홉 조립 단계로 구성되어 있습니다. 각 섹션의 소개 페이지에서는 무엇이 섹션내의 단계들로 진행되는지 왜 진행되는지를 설명하고, 그 특정 부분에 필요한 도구와 부품을 모두 나열합니다.
아래 세부 내용들을 살펴볼 수 있습니다.
섹션 1 : 납땜 연결
섹션 2 : 열 수축 튜브 적용하기
섹션 3 : 붐 조립
섹션 4 : 붐과 ESC를 섀시에 장착
섹션 5 : 송신기, 모터 및 비행 컨트롤러 설정
섹션 6 : 최종 배선 및 아래쪽 섀시 플레이트 부착
섹션 7 : 비행 컨트롤러와 수신기 설치
섹션 8 : 배터리 부착
섹션 9 : ESC 동기화 및 프로펠러 마운팅

준비하기
1. 키트에 포함된 중요한 안전 정보 시트를 읽어보십시오. 쿼드콥터를 조립하는 것은 보람되지만 잠재적으로 위험이 내재되어 있어서, 당신이 즐거움을 극대화하고 위험을 최소화하기 위해 관련된 위험들을 이해하는 것이 매우 중요합니다. 납땜 또는 조립 그리고 ELEV-8을 동작할 때 항상 보안경을 착용하십시오.
2. 키트에 첨부된 부품 내역과 키트의 내용을 상호 확인합니다. (일부 별도로 표시되지 부품과 작은 서브 키트 항목이 있습니다. 부품 및 수량은 예고없이 변경될 수 있습니다.)
3. 조립을 시작하기 전에 조립설명서를 전부 읽어 보기 바랍니다. 조립 및 테스트에는 기술 수준, 장비 및 작업 공간에 따라, 6 -12 시간이 소요됩니다. 당신이 납땜 경험이 없는 경우라면, 이 프로젝트를 시작하기 전에 먼저 배우고 연습하기를 추천합니다.
4. 키트와 조명 그리고 편안한 작업 영역등 조립에 필요한 모든 도구들을 준비합니다.
5. 리튬-폴리머 (Lithium-Ploymer) 배터리의 안전하고 올바른 사용법을 스스로 익힌 후, 리튬 폴리머 배터리를 충전하세오.
알림! 조립 및 테스트 과정을 서두르지 마세요. 당신이 조립 지시사항들을 천천히 그리고 정확하게 따르는 경우에, ELEV-8에 대한 어떤 문제나 시행착오를 겪지 않습니다. 실수로 다음 단계의 어떤 부분을 간과하는 경우라면, 당신은 비행 이전에 상당한 문제 해결을 필요로 하는 기능 장애 쿼드콥터로 끝날 수 있습니다. 각 단계마다 당신의 작업을 반복해서 점검하기 바랍니다!
추가요구 항목
• 무선 제어 송신기와 수신기; 비행을 위해서는 최소 5 채널이 필요합니다. 우리는 다음제품들을 추천합니다. SPEKTRUM DX6i 송신기와 SPEKTRUM AR610 수신기 (또는 OrangeRX R615); 이런 구성은 하나의 여분 서보를 필요로 하는 간단한 프로젝트가 될 수 있을 것입니다. 만약 제어 카메라 짐벌과 같은 보다 정교한 프로젝트를 구축하려고 한다면, 우리는 SPEKTRUM의 DX8과 연결되는 SPEKTRUM AR8000 수신기 (또는 OrangeRC R800X) 그리고 SPEKTRUM TM1000 원격 측정 송신기를 추천합니다. 이 장비는 다소 고가이지만, 고품질이며 현재와 미래의 요구를 충족할 것입니다.
• 3000-4400 MAH 용량과 최소 20C 방전 속도를 갖는 리튬-폴리머(LiPo) 배터리, 패럴-랙스 제품 (# 752-00010).
• "리튬-폴리머 밸런스 충전기" (패럴-랙스 제품 # 752-00009). 리튬-폴리머 배터리를 위해 설계되지 않은 충전기를 사용하면 LiPo배터리는 불꽃과 독성 연기를 방출할 수 있습니다.
• 리튬-폴리머 저전압 알람 (패럴렉스 제품 # 752-00014). 배터리 전압이 낮을 때 매우 크게 부저를 울려 줍니다. 이런 기능은 배터리를 크게 손상하거나 ELEV-8 충돌 위험을 감소시켜 줄 겁니다.
알림! 우리는 당신이 ELEV-8 충돌 팩 (# 80080)를 가지고 있기를 추천합니다. 충돌은 학습 과정에서 피할 수 없는 부분이며, 교체 부품으로 시간을 허비하지 않기를 바랍니다.
필요한 도구
• 안전 안경 (# 700-10003)
• 와이어 스트리퍼 / 커터 (12-16 AWG)
• 눈금자 또는 측정 테이프
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사양 )
• 5/32 "(4mm) 구멍이 있는 금속이나 목재 블록 (선택 사항)
• 전기 테이프 또는 열 수축 관
• 히트 건 , 헤어 드라이어, 또는 납땜 인두
• 작은 플랫 헤드 스크루 드라이버
• # 1 필립스 헤드 드라이버
• 연필
• 영구 마커
• 가위
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
• 대각선 절단기
• 날카로운 칼, 면도날, 또는 사포 (모래 80 ~ 200)
• 5/16 "렌치, 5/16"소켓, 또는 조절 렌치
• 펜치
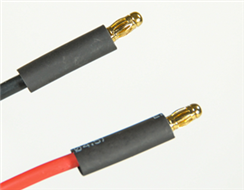
섹션 1 : 납땜 연결
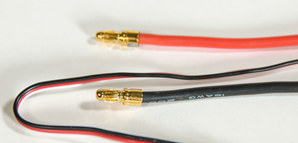
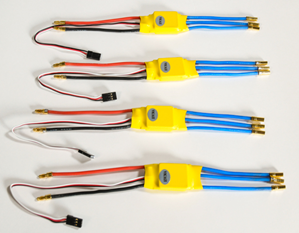
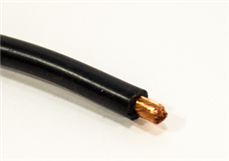
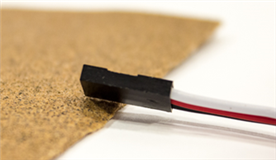
섹션 1의 모든 단계는 ELEV-8 V2 전기 연결에 초점을 맞출 것이다. 구성품간의 모든 고전류 연결은 금도금 총알 커넥터를 사용하고, 와이어에 납땜되어야 하며 열수축 튜브로 피복되어야 합니다. (아래 이미지의 왼쪽과 오른쪽은 각각 「male」과 「female」을 나타낸다.) 이런 작업은 모터 극성을 변경하고 교체하거나 필요에 따라 구성 요소를 업그레이드하는 작업들에서 안정적인 연결을 보장합니다.

당신은 무연납을 사용할지 또는 유연납을 사용할지 여부에 대하여 결정해야 합니다. 보통, 땜납은 대부분 주석과 납으로 구성됩니다. 납이 (어떤 형태로 섭취하는 경우에만) 인체에 유해한 독소로 알려져 있기 때문에, 무연납의 인기가 높아져 있습니다. 그렇지만, 많은 사람들은 여전히 다른 안전 수단을 사용하면서, 강력한 납땜 연결을 할 수 있는 유연납을 사용하고, 성능보다 안전이 우선되는 경우 무연납을 선택합니다.
납땜 연결은 6 단계로 구성되어 있으며, 당신의 기술 수준과 장비에 따라 약 2-6시간 소요될 것입니다.
이 절에 필요한 도구
• 와이어 스트리퍼 / 커터 (12-16 AWG)
• 눈금자 또는 측정 테이프
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍이 있는 금속이나 목재 블록 (선택 사항)
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사양 )
이 절에 필요한 부품
• 1-16 AWG 실리콘 와이어, 블루 (# 750-00061)
• 4-1050 kV의 브러시리스 모터 및 액세서리 (# 750-90008)
• 20-3.5 MM "남성"총알 커넥터 (# 450-00050)
• 24-3.5 MM "여성"총알 커넥터 (# 450-00050)
• 4 - 30A 전자 속도 컨트롤러 (ESC) (# 750-90009)
• 1 - EC3 "남성 / 여성"커넥터 쌍 (# 452-00088)
• 1 - 리튬 폴리머 배터리 (포함되지 않음)

1 단계 : 확장 전선 준비
이 단계에서는 전선을 어떤 길이로 절단하고 확장 전선이 전자 속도 제어기와 모터를 서로 연결하는데 사용된다.
필요 도구
• 와이어 스트리퍼 / 커터 (12-16 AWG)
• 눈금자 또는 측정 테이프
필요 부품
• 15 '- 16 AWG 실리콘 와이어, 블루 (# 750-00061)
지시사항들
1. 눈금자를 사용하거나 테이프를 측정하고 와이어를 자른다. 12개의 전선 각각 길이는 12인치(30.5 cm)로 자른다.

2. 와이어 스트리퍼를 사용하여, 전선 피복의 1/8"(3mm)를 제거하고 모두 금속선을 노출한다.


3. 나머지 11개의 전선을 반복합니다.
알림! 이 단계의 마지막에서, 당신은 몇 가지 여분의 와이어를 준비해야 합니다. 당신이 약간 짧은 조각으로 끝을 제거하기를 원할 수 있고, 다음 단계 납땜을 연습하는데 사용할 수 있습니다
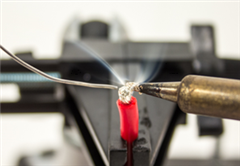
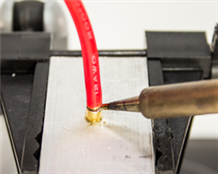
2 단계 : 모터 총알 커넥터 납땜
섹션 1의 남은 단계를 통하여, 당신은 ELEV-8의 전기적 연결을 모두 납땜합니다. 여기서, 당신은 모터 와이어 리드에 "male" 총알 커넥터를 납땜합니다. 시작하기 전에 (아래)이 조립 단계에 대한 비디오를 시청하십시오.
경고!
심한 화상의 위험. 납땜 철 팁은 매우 뜨거워질 수 있으며, 결코 철 팁을 만지지 마세요.
폐 자극의 위험. 납땜 연기 직접 흡입을 피할 것; 항상 통풍이 잘되는 곳에 납땜할 것.
유/무연 납에 관계없이 마시거나 먹지 않도록 합니다. 납땜 후에는 철저하게 손을 씻으십시오.
필요 도구
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍 금속이나 목재 블록 (선택 사항)
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사양 )
필요 부품
• 4-1050 kV의 브러시리스 모터 (# 750-90008)
• 12-3.5 MM "남성"총알 커넥터 (# 450-00050)
알림! 당신이 모터의 포장을 제거할 때 포함된 모든 액세서리들을 보관해야 합니다. 당신은 총알 커넥터를 사용해야 하고, 열 수축 튜브 및 각 모터에 포함된 프로펠러 어댑터들을 이후 단계에서 사용해야 합니다.
지시사항들
알림! 이전에 총알 커넥터를 납땜해본 적이 없다면, 이전 단계에서 언급한 여분의 전선을 사용하여 여분의 총알 커넥터로 연습하기 바랍니다. (두 개의 추가 총알 커넥터가 있습니다).
1. 각각의 모터 리드의 끝에서 와이어를 타고 함께 각각의 전선을 모두 가지고 손가락을 사용하여 트위스트.

2. 노출된 금속 와이어가 위쪽을 가리키도록 바이스에 전선을 클램프.
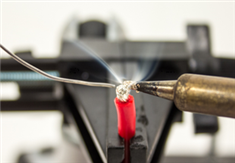
3. 인두 팁의 세정 후, 인두 선단에 소량의 "주석" 땜납 적용(이렇게 하면 더 열전도를 좋게 할 것이다).
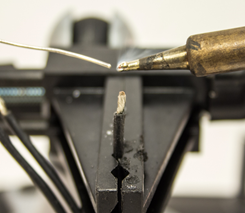
4. 와이어의 선단에 소량의 땜납을 적용한 다음, 납땜 인두를 제거하기 전에 전선이 용융 땜납으로 흡수되어 덮여있는 상태가 되도록 합니다. 이 작업은 (최대 15 초) 시간이 걸릴 수 있지만, 땜납이 갑자기 와이어의 선단 주위로 "흐름"을 개시할 때 순간을 의미합니다. 만일 당신이 납땜을 녹여 넣는 작업이 어렵다면, 납이 용융된 상태 안으로 전선을 담그는 방법을 사용할 수도 있습니다. 모든 전선에 대하여 "주석 도금" 과정을 반복합니다.
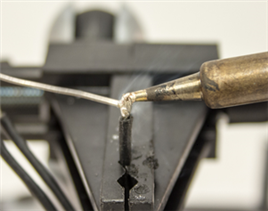
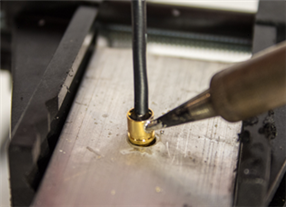
5. 얕은 "컵"이 위로 향하도록 놓고, 남성 총알 커넥터를 바이스에 놓습니다. 당신이 블록을 사용하는 경우, 블록 구멍에 총알 커넥터를 장착하고 바이스로 클램프합니다.
6. 총알 커넥터의 "컵"의 측면에 있는 작은 구멍으로 납땜 인두를 고정하고, "컵"에 절반정도 가득 찰 때까지 천천히 땜납을 녹여 넣습니다. 납을 내려놓습니다.
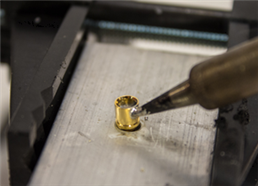
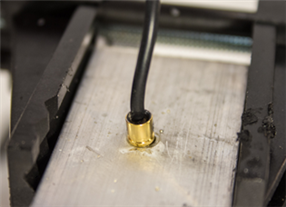
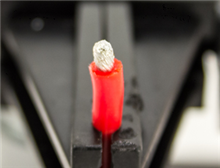
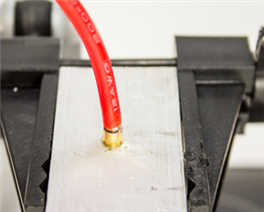
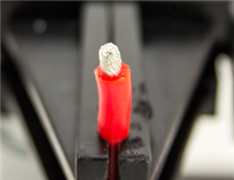
7. 구멍으로 납땜 인두를 유지하면서, 천천히 모터 전선을 "컵"에 완전히 넣고 약 15 초 동안 납땜 인두를 구멍에서 유지합니다. 이것은 "cold" 납땜 연결(납땜이 제대로 양면에 융합되지 않은 불량)을 방지하는 데 도움이 될 것입니다.
8. 납땜 인두는 제거하지만, 땜납이 냉각되어 고정될 때까지 모터 전선을 잡고 있어야 합니다. (약 10 초 걸림) 아래 그림과 같이 좋은 납땜 연결이어야 합니다; 만약 당신이 만족하지 않으면 항상 연결을 다시 반복할 수 있습니다.
9. 각각의 모터에 세 개의 리드가 있어서 총 12개의 "male" 총알 커넥터 각각에 납땜을 반복합니다.

3 단계 : 확장 와이어 총알 커넥터 납땜
당신은 확장 와이어의 양단에 있는 "male"과 "female" 총알 커넥터를 납땜 2 단계에서 배운 같은 납땜 기술을 사용합니다.
필요 도구
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍 금속이나 목재 블록 (선택 사항)
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사항)
필요 부품
• 12 - 단계 2에서 제조 확장 전선,
• 12-3.5 MM "남성"총알 커넥터 (# 450-00050)
• 12-3.5 MM "여성"총알 커넥터 (# 450-00050)
지시사항들
1. 비틀고 납땜하기 위한 전선들을 준비합니다. (단계 2에서와 동일한 방법)
a. 각 전선 끝부분을 잡고, 손가락으로 꼬아서(twist) 하나로 만듭니다.
b. 노출 된 금속 전선이 위쪽으로 향하도록 바이스에 전선 중 하나를 고정합니다.
c. 인두 팁을 세정한 후, 인두 선단에 소량의 땜납을 묻힙니다.
d. 전선의 선단에도 소량의 땜납을 적용한 다음, 납땜 인두를 제거하기 전에 전선이 용융 땜납으로 흡수되어 덮여있는 상태가 되도록 합니다. 이 작업은 (최대 15 초) 시간이 걸릴 수 있지만, 땜납이 갑자기 와이어의 선단 주위로 "흐름"을 개시할 때 순간을 의미합니다.
e. 모든 전선에 대하여 이와 같은 과정을 반복합니다.
2. "male" 총알 커넥터를 열 두개의 확장 와이어들 중 하나의 끝과 납땜한다. (단계 2와 동일한 절차);
a. 얕은 "컵"이 위로 향하도록 총알 커넥터를 바이스에 고정합니다. 당신이 블록을 사용하는 경우, 블록 구멍에 총알 커넥터를 장착하고 블록을 바이스로 고정합니다.
b. 총알 커넥터의 "컵"의 측면에 있는 작은 구멍에 납땜 인두를 넣고 땜납이 절반 가득 찰 때까지 "컵"에 천천히 녹여 넣습니다. 그리고 납을 내려 놓습니다.
c. 납땜 인두로 "컵"의 구멍을 잡고 있는 상태에서, 천천히 그리고 완전히 "컵"속으로 확장 와이어의 끝을 삽입하고 약 15 초 동안 납땜 인두를 계속 유지합니다. 이것은 "cold" 납땜 연결(납땜이 제대로 양면에 융합되지 않은 불량 상태)을 방지하는 데 도움이 될 것입니다.
d. 납땜 인두는 제거하지만, 땜납이 충분히 냉각되어(약 10 초) 고정될 때까지 모터 전선을 잡고 있어야 합니다.
3. 동일한 절차를 사용하여, 열두개의 확장 전선 각각의 끝부분에 "female" 총알 커넥터를 납땜합니다.


4 단계 : 납땜 ESC 총알 커넥터
이 단계에서는 다시 2 단계에서 배운 같은 납땜 기술을 사용하게 될 것입니다. 하지만 이번에는 ESC의 양단에 "male"과 "female" 총알 커넥터를 납땜합니다.
필요 도구
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍 금속이나 목재 블록 (선택 사항)
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사항)
필요 부품
• 4 - 30A 전자 속도 컨트롤러 (ESC) (# 750-90009)
• 8-3.5 mm의 "남성"총알 커넥터 (# 450-00050)
• 12-3.5 MM "여성"총알 커넥터 (# 450-00050)
지시사항들
1. 비틀어서 납땜할 전선을 준비합니다. (단계 2에서와 동일한 방법)
a. 각 전선 끝부분을 잡고 모든 가닥들이 하나가 되도록 손가락으로 꼬면 됩니다.
b. 노출 된 금속 전선이 위쪽을 가리키도록 바이스에 전선을 고정합니다.
c. 인두 팁을 세정한 후, 인두 선단에 소량의 땜납을 뭍힙니다.
d. 전선의 선단에도 소량의 땜납을 적용한 다음, 납땜 인두를 제거하기 전에 전선이 용융 땜납으로 흡수되어 덮여있는 상태가 되도록 합니다. 이 작업은 (최대 15 초) 시간이 걸릴 수 있지만, 땜납이 갑자기 와이어의 선단 주위로 "흐름"을 개시할 때 순간을 의미합니다.
e. 모든 전선에 과정을 반복합니다.
2. 각 ESC 검은색 빨간색 입력 단자에 "male" 총알 커넥터를 납땜합니다. (2 단계에서와 동일한 절차);
a. 얕은 "컵"이 위로 향하도록 총알 커넥터를 바이스에 고정합니다. 당신이 블록을 사용하는 경우, 블록 구멍에 총알 커넥터를 장착하고 블록을 바이스로 고정합니다.
b. 총알 커넥터의 "컵"의 측면에 있는 작은 구멍에 납땜 인두를 넣고 땜납이 절반 가득 찰 때까지 "컵"에 천천히 녹여 넣습니다. 그리고 납을 내려 놓습니다.
c. 납땜 인두로 "컵"의 구멍을 잡고 있는 상태에서, 천천히 그리고 완전히 "컵"속으로 확장 와이어의 끝을 삽입하고 약 15 초 동안 납땜 인두를 계속 유지합니다. 이것은 "cold" 납땜 연결(납땜이 제대로 양면에 융합되지 않은 불량 상태)을 방지하는 데 도움이 될 것입니다.
d. 납땜 인두는 제거하지만, 땜납이 충분히 냉각되어(약 10 초) 고정될 때까지 모터 전선을 잡고 있어야 합니다.
3. 동일한 절차를 사용하여 각 ESC의 청색 출력 단자에는 "female" 총알 커넥터를 납땜합니다.

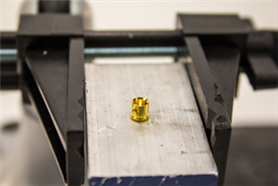
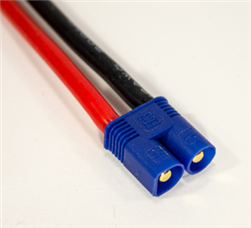
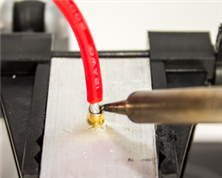
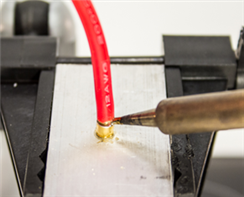
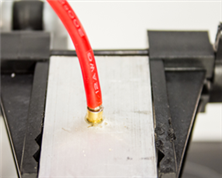
5 단계 : 파워 브레이크 아웃 EC3 커넥터 납땜
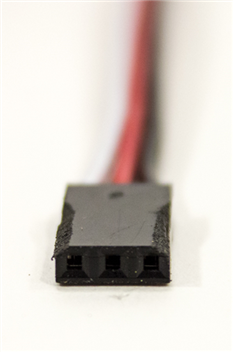
ELEV-8 납땜 조립의 마지막은 파워 브레이크 아웃 케이블 (이 단계) 와 배터리 리드 (6 단계)를 EC3 커넥터(아래 이미지)에 납땜하는 것입니다. 이것은 가장 어려운 조립 단계 중 하나입니다, 그래서 우리는 강하게 당신이 여유의 시간을 가지고 아래 동영상을 시청하면서 작업에 대해 연구하기를 제안합니다. ( "EC3 커넥터 납땜" 등의 일부 비디오 시청)

알림! EC3 커넥터 연결은 연결부의 "성(male/female)"을 동일하게 표현합니다. 이미지의 오른쪽 하우징이 왼쪽 하우징으로 삽입됩니다. 그래서 오른쪽 하우징을 "male" 왼쪽 하우징을 "female" 으로 부릅니다. 그렇지만, 두 개의 하우징은 서로 연결하는 용도로 사용됩니다. 접촉을위한 플러그의 성별이 접점의 성별에 의해 정의되어 있기 때문에, 왼쪽에 있는 플러그가 "female" 오른쪽 플러그가 "male" 입니다.
필요 도구
• 와이어 스트리퍼 / 커터 (12-16 AWG)
• 눈금자 또는 측정 테이프
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍 금속이나 목재 블록 ( 선택 사양 )
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사양 )
• 작은 플랫 헤드 스크루 드라이버
• 펜치
필요 부품
• 1 - 파워 브레이크 아웃 케이블 (# 800-00006)
• 1 - / 커버와 총알 커넥터 (다른 총알 커넥터와 호환되지) (# 452-00088) W "male"/ "female" EC3 쌍
지시사항들
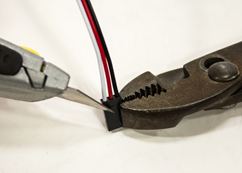
1. 조심스럽게 커넥터 바로 뒤에 전원 브레이크 아웃 케이블의 HXT 커넥터를 자릅니다.
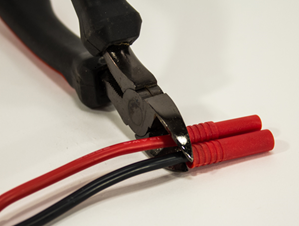
2. 와이어 스트리퍼를 이용하여, 각 리드의 끝부분에서 약1/8"(3mm) 피복을 제거합니다.

3. 전원 브레이크 아웃 케이블의 양쪽 단자에 대해서, 노출 된 금속 전선들을 잡고 손가락으로 꼬아서 하나가 되도록 합니다.
4. 노출 된 금속 전선이 위쪽을 가리키도록 바이스에 고정합니다.
5. 인두 팁을 세정한 후, 인두의 끝부분에 소량의 납을 뭍힙니다.
6. 전선의 선단에도 소량의 땜납을 적용한 다음, 납땜 인두를 제거하기 전에 전선이 용융 땜납으로 흡수되어 덮여있는 상태가 되도록 합니다. 이 작업은 (최대 15 초) 시간이 걸릴 수 있지만, 땜납이 갑자기 와이어의 선단 주위로 "흐름"을 개시할 때 순간을 의미합니다.
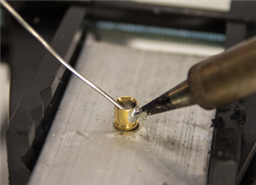
7. 이제 EC3 커넥터와 함께 제공된 "male" 총알 커넥터 하나를 가져와서 바이스에 고정합니다.
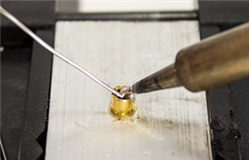
8. 납땜 인두 끝 부분을 주석 도금 한 후, 총알 커넥터 가장자리에 놓고, 전체 1/3까지 납이 채워지도록 "컵"에 천천히 납을 녹입니다. 그 다음 납을 내려 놓습니다. (총알 커넥터의 외부로 납이 유출되는 과잉 땜납을 방지하기 위해 너무 많은 납을 사용하지 않아야 합니다.)
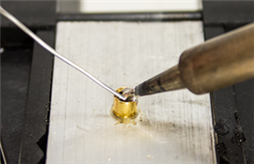
9. 그 자리에 납땜 인두를 잡고 있는 상태에서, 전원 브레이크 아웃 케이블의 리드 중 하나를 가져와서 천천히 컵에 삽입합니다.
10. 일단 완전히 컵에 삽입되었다면, 컵의 가장자리에서 또 다른 10 초 동안 컵 테두리와 와이어를 납땜 인두로 가열합니다. 이것은 불량 납땜을 방지하는데 도움이 됩니다.
알림! 총알 커넥터의 외부에 흐르는 과잉 땜납을 방지해야 합니다. 총알 커넥터 외부의 과잉 납은 플라스틱 연결 하우징으로 총알 커넥터를 연결하기 어렵거나 불가능하게 할 수 있습니다. 날카로운 Hobby 칼 또는 커팅 휠 등 도구를 사용하여 총알 커넥터 외부의 과잉 납을 모두 제거해야 합니다.
11. 납땜 인두를 제거하고 납이 굳을 때까지 전선을 잡고 있어야 합니다.
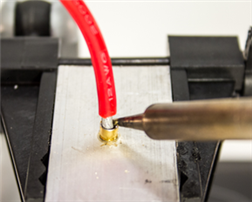
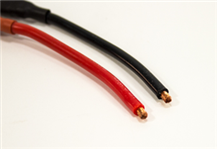
12. 총알 커넥터가 납땜과정으로 여전히 따뜻한 동안(직접 만지지 마십시오! 데일 수 있습니다.), 플라스틱 커넥터 하우징의 뒷면으로 삽입합니다. 빨간색(+) 리드는 두 하우징 (하우징에도 +/- 표시가 되어 있다) 중에서 더 크고("female") "D" 모양으로 생긴 구멍으로 들어갑니다.

13. 딱딱한 표면위에 커넥터 (바닥, 바람직하게는 콘크리트)를 놓고, 플라이어(또는 펜치)로 잡습니다. 손으로 하우징을 잡지 마십시오, 또는 실수로 자신을 찌를 수도 있습니다. 작은 일자 드라이버와 강한 압력으로 총알 커넥터를 플라스틱 하우징으로 밀어 넣습니다. (망치를 신중하게 사용할 수 있습니다). 총알 커넥터가 제대로 플라스틱 하우징에 잠길 때 어떤 느낌을 느낄 것이다. (혹시 들릴 수도 있습니다.) 그러면 아래와 같이 나타나야 합니다.
14. 또 다른 "male" 총알 커넥터를 또 다른 파워 브레이크 아웃 케이블로 납땜하기 위해 8 단계부터 13단계까지를 반복합니다.
5.5 단계 : 배터리 EC3 커넥터 납땜
ELEV -8- 조립의 최종 납땜 단계에서 배터리 단자에 EC3 커넥터를 납땜합니다. 이것은 가장 어려운 조립 단계 중 하나입니다, 그래서 우리는 당신이 시간을 내서 이 비디오를 시청 시작하기 전에 EC3 커넥터 납땜에 대해서 생각해보기를 강하게 추천합니다.
만약 배터리에 EC 커넥터가 납땜된 상태라면 이 단계를 건너뛸 수 있습니다. 비록 패럴렉스 리튬-폴리머 배터리 (# 752-00010)가 총알 커넥터와 함께 있지만, 그것들은 EC3 커넥터 하우징에 꼭 맞지 않아서, 그래서 교환되어야 합니다.
경고 ! 모든 배터리 리드가 동시에 노출되는 상황을 만들지 마십시오. 두 개의 리드가(직접 또는 전도성 개체를 통해, 철사 절단기) 서로 접촉한다면, 배터리가 매우 위험한 단락상태가 되어 배터리를 손상시키고, 화염이나 유독 가스를 발생시킬 것입니다. 하나의 단자를 적절하게 절연상태로 유지시키고 항상 단락을 방지하도록 보호하도록 합니다.
필요 도구
• 와이어 스트리퍼 / 커터 (12-16 AWG)
• 눈금자 또는 측정 테이프
• 납땜 인두
• 로진 코어 솔더
• 워크 지주 바이스
• 5/32 "(4mm) 구멍 금속이나 목재 블록 ( 선택 사양 )
• 로진 납땜 플럭스 붙여 넣기 ( 선택 사양 )
• 전기 테이프 또는 열 수축 관
• 작은 플랫 헤드 스크루 드라이버
• 펜치
필요 부품
• 1 - 리튬 폴리머 배터리
• 1 - / 커버와 총알 커넥터 (다른 총알 커넥터와 호환되지) (# 452-00088) W "male"/ "female" EC3 쌍
지시사항들
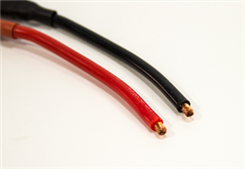
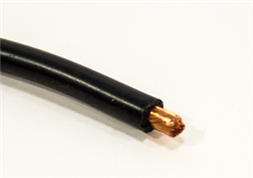
1. 배터리 단자에 어떤 커넥터 바로 뒤 적색(빨강) 단자만 조심스럽게 자릅니다; 두 개 전선을 동시에 절단하지 마십시오. 만약 배터리가 사전에 납땜된 상태의 어떤 커넥터와 함께 제공되지 않은 경우, 절연테이프를 감거나 또는 음(검은 색)의 단자 끝부분에 열 수축 튜브를 감습니다.
2. 와이어 스트리퍼를 사용하여 리드의 끝 1/8"(3 mm)에서 절연 피복을 제거합니다.

3. 현재 전선의 노출된 금속부를 손가락으로 꼬아서 여러 가닥의 전선들이 하나로 뭉쳐지도록 합니다.
4. 전선의 노출 금속 부분이 위쪽을 가리키도록 바이스에 고정시킨다.
5. 인두 팁을 세정하고, 인두 끝부분에 소량의 납을 뭍힙니다.
6. 전선의 선단에도 소량의 땜납을 적용한 다음, 납땜 인두를 제거하기 전에 전선이 용융 땜납으로 흡수되어 덮여있는 상태가 되도록 합니다. 이 작업은 (최대 15 초) 시간이 걸릴 수 있지만, 땜납이 갑자기 와이어의 선단 주위로 "흐름"을 개시할 때 순간을 의미합니다.
7. 이제 EC3 커넥터와 함께 제공되는 "female" 총알 커넥터 중 하나를 가져와서 바이스에 고정시킵니다.
8. 납땜 인두의 끝 부분을 주석으로 도금한 후, 총알 커넥터의 가장자리에 놓고, "컵"의 전체 1/3까지 채워지도록 천천히 땜납을 녹여서 채워 넣습니다. 그 다음 납을 내려 놓습니다. (총알 커넥터 외부로 납이 유출되는 과잉 땜납을 방지하기 위해 너무 많은 납을 사용하지 않도록 합니다.)
9. 현재 자리에 납땜 인두를 잡고 있으면서, 커넥터로 배터리 단자를 가져와서 천천히 컵으로 삽입합니다.
10. 일단 완전히 컵으로 삽입되었다면, 컵 테두리에 인두를 대고 있는 상태에서 추가 10초동안 컵과 전선을 가열합니다. 이 작업은 불량 납땜 연결을 방지하는데 도움을 줄 겁니다.
알림! 총알 커넥터 외부에 흐르는 과잉 땜납은 반드시 제거해야 합니다. 총알 커넥터 외부의 과잉 땜납은 플라스틱 커넥터 하우징으로 총알 커넥터를 설치하기 어렵게 하거나 불가능하게 할 수 있습니다. 별도의 도구를 사용하여 총알 커넥터 외부의 과잉 땜납을 제거하도록 합니다.
11. 납땜 인두를 제거하고, 땜납이 경화될 때까지 전선을 계속 잡고 있어야 합니다.
12. 총알 커넥터가 납땜과정으로 여전히 따뜻한 동안(직접 만지지 마십시오! 데일 수 있습니다.), 플라스틱 커넥터 하우징의 뒷면으로 삽입합니다. 빨간색(+) 리드는 두 하우징 (하우징에도 +/- 표시가 되어 있다) 중에서 더 크고("female") "D" 모양으로 생긴 구멍으로 들어갑니다.

13. 딱딱한 표면위에 커넥터 (바닥, 바람직하게는 콘크리트)를 놓고, 플라이어(또는 펜치)로 잡습니다. 손으로 하우징을 잡지 마십시오 , 또는 실수로 자신을 찌를 수도 있습니다. 작은 일자 드라이버와 강한 압력으로 총알 커넥터를 플라스틱 하우징으로 밀어 넣습니다. (망치를 신중하게 사용할 수 있습니다). 총알 커넥터가 제대로 플라스틱 하우징에 잠길 때 어떤 느낌을 느낄 것이다. (혹시 들릴 수도 있습니다.) 그러면 아래와 같이 나타나야 합니다.
14. 단계 1부터 13까지를 반복하세요. 또 다른 "female" 총알 커넥터를 또 다른 배터리 단자로 연결합니다.

섹션 2 : 열 수축 튜브 적용하기
이제 전선에 총알 커넥터를 납땜했다면, 당신은 납땜 연결부를 보호하고 의도하지 않은 전기적 접촉을 방지하기 위해 열 수축 튜브로 그들을 덮을 것입니다.
이 작업은 다음 두 단계로 이루어지며 당신의 기술수준과 장비에 따라 완료하는데 2 시간 45분 정도 소요될 것입니다.
이 절에 필요한 도구
• 와이어 스트리퍼 / 커터 나 가위
• 눈금자 또는 측정 테이프
• 히트 건, 헤어 드라이어, 또는 납땜 인두
이 절에 필요한 부품
• 30 "- 열 수축 튜브, 3/16"(# 800-00023)
• 4-1050 kV의 브러시리스 모터 (# 750-90008)
• 12 - 3 단계에서 제조 된 확장 전선,
• 4 - 전자 속도 컨트롤러 (ESC) (# 750-90009)

6 단계 : 열 수축 튜브 절단
열 수축 튜브는 이 연결에 적용되기 전에 키트에 포함 된 긴 롤로부터 작은 길이로 절단한다.
필요 도구
• 가위
• 눈금자 또는 측정 테이프
필요 부품
• 18 "- 열 수축 튜브, 3/16"(# 800-00023)
지시사항들
1. 눈금자 또는 측정용 테이프를 사용해서, 1/2 인치 (13mm) 길이로 32개의 열 수축 튜브를 자른다.


7 단계 : 모든 커넥터에 열수축 튜브 적용
이 단계에서, 열 수축 튜브는 섹션 1에서 납땜된 모든 총알 커넥터에 적용할 것이다.
경고! 심하게 태우면 위험합니다. 온풍기 장치는 수백도의 공기를 생성하고 사용할 때 매우 뜨거워진다. 장치의 노즐 근처에 모든 신체의 일부 또는 가연성 물체를 놓지 마세요.
필요 도구
• 히트 건, 헤어 드라이어, 또는 납땜 인두
필요 부품
• (32) - 3/16 "열 수축 튜브 것은, 단계 6에서 제조의 1/2 인치 (13mm) 길이
• 24 - 열 수축 튜브, 3/16 "X 3/4"(각 모터와 함께 제공된 액세서리의 일부)
• 4-1050 kV의 브러시리스 모터 (# 750-90008)
• 12 - 단계 4에서 제조 확장 전선,
• 4 - 전자 속도 컨트롤러 (ESC) (# 750-90009)
지시사항들
1. 는 ESC 및 확장 와이어의 "여성"총알 커넥터의 경우 :이 커넥터의 끝이 닿을 때까지 커넥터에 3/4 "열 수축 튜브 (HST)의 조각을 밀어 넣습니다.

2. ESC, 확장 와이어와 모터의 "male" 총알 커넥터의 경우 : 커넥터의 "입술" 높이까지 커넥터에 1/2" HST 조각을 밀어 넣습니다.
3. HST 수축이 멈출 때까지 커넥터의 모든 부분에 온풍기 열을 제공하여 수축시킵니다. 온풍기의 위치는 약 1 -3 인치 떨어진 상태를 유지합니다.

4. 약 ¼ 인치 떨어져서 온풍기 열을 제공하면서 HST 수축이 멈출 때까지 커넥터의 모든 부분들을 헤어드라이로 조심스럽게 가열합니다.

5. 납땜 인두를 사용하여 수축시키려면, HST 주위를 인두로 천천히 문지르면서 모든 면들이 수축되도록 커넥터를 회전시킵니다.

6. 제작된 모든 HST를 검사해보고, 아래 첫 번째 체크 마크 사진처럼 나타나야 합니다. X마크의 사진 모양은 불량 HST의 실예이고, 다시 작업되어야 합니다.
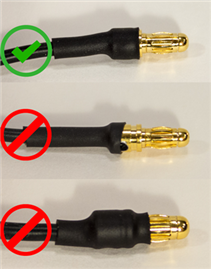
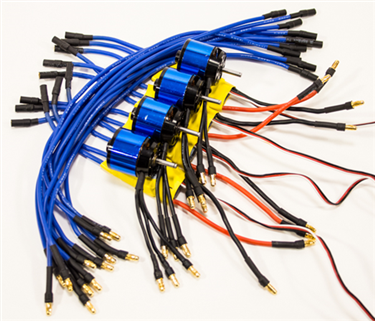
모든 단계의 결과물들을 아래 사진에서 보여줍니다.
섹션 3 : 붐 조립
이 섹션에서는, 충돌의 경우에 모터를 보호하는 역할을 위하여, 모터 마운트라고 이름 붙여진 곳에 모터를 장착합니다. 모두 세트가 조립된 후에는 쿼드-콥터의 전면을 표시하는 두 개의 붐에 크롬 스티커를 부착합니다; 그렇지 않으면 비행하는 동안 ELEV-8이 어떤 방향이 전면인지를 구분할 수 있는 방법이 없습니다. 마지막으로, 상기 모터 마운트 및 랜딩 기어는 붐에 체결합니다.
경고! 유혹이 있을 수 있지만, 아직 모터에 프로펠러를 부착하지 마십시오. 사실, 그렇게 할 필요가 없으며 잠시 그들을 챙겨두어도 됩니다.
이 섹션에서는 기술 수준과 장비에 따라 약 1 ~ 2 시간이 소요됩니다.
여기서 필요한 도구
• 1.5 mm의 16 진수 키 (# 725-00067)를
• # 1 필립스 헤드 드라이버
• 눈금자 또는 측정 테이프
• 연필이나 펜
• 가위
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
필요한 부품
• 1 - 크롬 스티커 (# 120-00008)
• 1 - 록타이트 ® 나사 고정 블루 242® (# 700-00106)
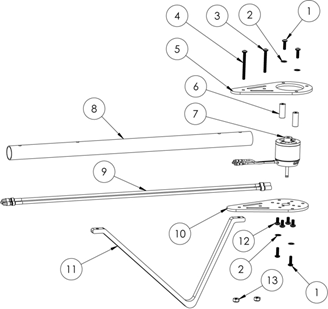
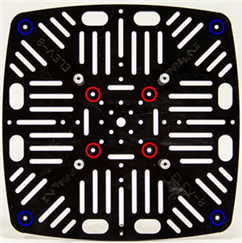
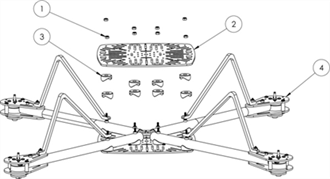
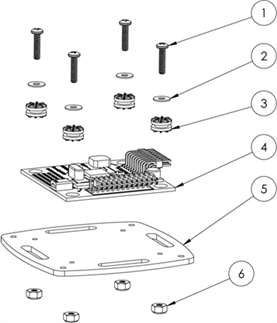
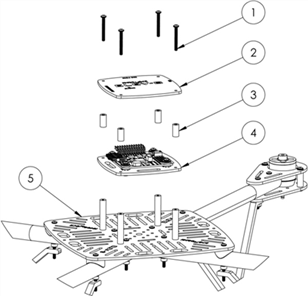
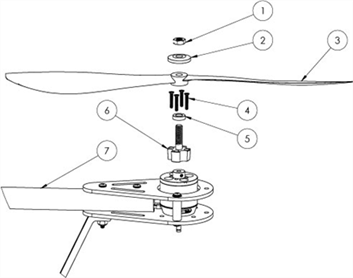
• 16 - 기계 나사, # 4-40 X 3/8 "(# 710-00036), 아래 그림에서 # 1
• 16 - 내부 잠금 와셔, # 4 (# 700-00059), 아래 그림에서 # 2
• 4 - 기계 나사, # 4-40 X 1 "(# 710-00002), 아래 그림에서 # 3
• 4 - 기계 나사, # 4-40 X 1 1/4 "(# 710-00042), 아래 그림에서 # 4
• 4 - 모터 마운트 상하 (# 721-80005), 아래 그림에서 # 5 (각각) # 10
• 8 - 알루미늄 스탠드 오프, # 4-40 X 5/8 "(# 713-00001), 아래 그림에서 # 6
• 4-1050 kV의 브러시리스 모터 (# 750-90008), 아래 그림에서 # 7
• 4 - 파란색 알루미늄 붐 (# 730-00060), 아래 그림에서 # 8
• 9 - 단계 7 에서 제조된 확장 전선, 아래 그림에서 # 9
• 4 - 착륙 기어 (# 721-80007), 아래 그림에서 # 11
• 16 - 기계 나사, M3-0.5의 X의 6mm (# 710-00039), 아래 그림에서 # 12
• 8 - 잠금 너트, # 4-40 (# 700-00024), 아래 그림에서 # 13

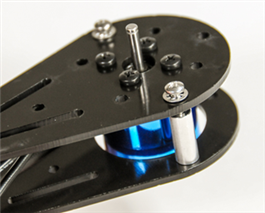
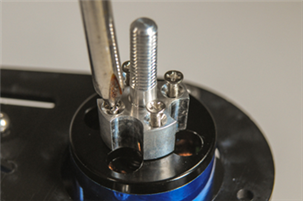
8 단계 : 록타이트 ® 모터 고정 나사
비행 중 풀림과 잠재적 장비 고장 발생을 방지하기 위해, 모터에 고정 나사를 설치하기 위해 록타이트를 적용.
필요 도구
• 1-1.5 mm의 16 진수 키
필요 부품
• 4-1050 kV의 브러시리스 모터 (# 750-90008)
• 1 - 록타이트 ® 나사 고정 블루 242® (# 700-00106)
지시사항들
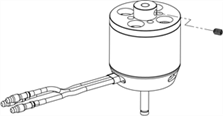
1. 육각키를 사용하여 조심스럽게 각각의 모터에서 모터 고정 나사를 제거합니다. 나사는 매우 빡빡할 수 있습니다; 당신의 육각 키를 부러뜨리지 않도록 주의하세요.

2. 각각의 모터의 경우, 세트 스크류 나사산 록타이트 소량을 적용하고 신중 나사를 다시. 각 단단히 나사하지만 지나치게 조이지 않는 좌석. 록타이트 ® 10 분 동안 설정할 수 있습니다; 그것은 24 시간 이내에 완전히 치료합니다.

9 단계 : 모터를 확장 전선에 연결
이제, 모터가 붐에 장착되면 이러한 연결에 도달할 수 없기 때문에, 모터에 확장 와이어를 연결합니다.
필요 부품
• 4 - 8 단계에서 제조 된 1050 kV의 브러시리스 모터,
• 12 - 단계 7에서 제조 확장 전선,
지시사항들
1. 하나 모터와 하나의 확장 와이어를 가져와서, 완전히 장착 될 때까지 확장 와이어에 "female" 총알 커넥터에 모터 단자의 "male" 총알 커넥터를 삽입합니다.

2. 이 모터, 다음 나머지 세 모터 각각의 리드로 확장 와이어를 연결하는 과정을 반복합니다.

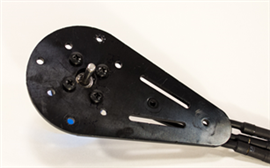
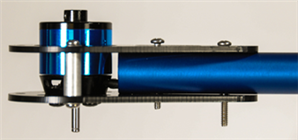
10 단계 : 하단 모터 마운트에 모터를 부착
마지막으로, 당신은 마지막으로 함께 부착하는 작업들을 시작할 수 있습니다. 먼저, 모터 마운트의 맨 아래에 모터를 고정합니다.
필요 도구
• # 1 필립스 헤드 드라이버
필요 부품
• 4-1050 kV의 브러시리스 모터 9 단계에서 제조 된 확장 전선, 승 /
• 4 - 모터 마운트 하단 (# 721-80005)
• 16 - 기계 나사, M3-0.5의 X의 6mm (# 710-00039)
지시사항들
1. 모터 마운트 플레이트에 전선을 정렬하고, 모터 마운트 하단의 중앙에 있는 구멍을 통해 모터의 축(샤프트)을 끼웁니다. 모터 바닥의 구멍이 마운트 플레이트 구멍과 정렬되었는지 살펴보아야 한다, 그래서 일직선으로 정렬되었는지 살펴보기 위해 마운트 플레이트를 뒤집어야할 수도 있다.

2. 한 번에 하나씩, 모터 마운트 하단의 가장 안쪽 구멍에 네 개의 나사를 삽입하고, 모터의 맨 아래에 있는 나사 구멍과 일치하는지를 확인하고, 드라이버로 조입니다.
3. 나머지 세 개의 모터에 대해서도 이 과정을 반복합니다.

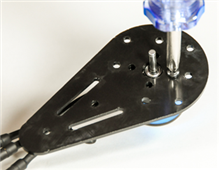
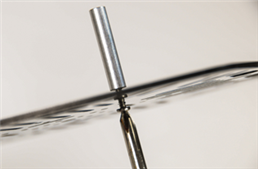
11 단계 : 최고 모터 마운트에 스탠드 오프를 부착
이제 모터가 안전하게 바닥 모터 마운트에 고정되어 있는지 살펴보고, 당신은 다음 단계에서 함께 상단과 하단 모터 마운트를 연결하는 데 사용되는 상단 모터 마운트에 스탠드 오프를 부착할 수 있습니다. 록타이트 ® 와 잠금 와셔를 함께 사용하기 시작할 때까지 나사가 가끔 비행 중 느슨한 진동으로 알려져 있기 때문에 록타이트 ® 및 잠금 와셔가 모두 여기에 사용된다.
필요 도구
• # 1 필립스 헤드 드라이버
• 펜치
필요 부품
• 8 - 알루미늄 스탠드 오프, # 4-40 X 5/8 "(# 713-00001)를
• 4 - 모터 마운트 최고 (# 721-80005)
• 8 - 기계 나사, # 4-40 X 3/8 "(# 710-00036)
• 8 - 내부 잠금 와셔, # 4 (# 700-00059)
• 1 - 록타이트 ® 나사 고정 블루 242® (# 700-00106)
지시사항들
1. 나사에 와셔를 끼운 다음 상위 모터 마운트의 측면에 나사 구멍을 통해 공급합니다.

2. 나사에 록타이트 한 방울을 적용합니다.
3. 펜치와 드라이버를 사용하여 교착 상태까지 스탠드오프 위의 나사를 조입니다.
4. 상단 모터 마운트의 반대쪽에 대해서도 작업을 반복하고, 나머지 세 개의 상단 모터 마운트에 대해서도 반복합니다.


12 단계 : 모터 마운트 상단과 하단 함께 결합
앞서 언급한 바와 같이, 당신은 지금 상단과 하단 모터 마운트를 조립할 것입니다.
필요 도구
• # 1 필립스 헤드 드라이버
필요 부품
• 4 - 모터 마운트 바닥 모터 조립 / W 10 단계에서 준비
• 4 - 모터 마운트 톱 스탠드 오프 조립 / W 11 단계에서 제조
• 8 - 기계 나사, # 4-40 X 3/8 "(# 710-00036)
• 8 - 내부 잠금 와셔, # 4 (# 700-00059)
• 1 - 록타이트 ® 나사 고정 블루 242® (# 700-00106)
지시사항들
1. 상단 모터 마운트를 들고 하단 모터 마운트 위에 놓는다. 그 다음 상단과 하단 구멍을 일치시켜서 스탠드오프를 끼운다.

2. 하단 모터 마운트의 구멍을 통하여 스탠드오프 상단으로 록타이트 한방울을 떨어뜨립니다.

3. 스크류에 록 와셔를 끼우고, 하단 모터 마운트 쪽의 구멍으로 나사를 넣어서 교착상태까지 나사를 조입니다.
4. 나머지 3개의 모터 마운트에 대해서도 동일한 작업을 반복합니다.

13 단계 : 두 개의 붐에 크롬 스티커 부착
당신이 붐에 모터를 장착하기 전에, 두 개의 붐에 크롬 스티커를 부착합니다. 일단 섀시에 장착되면, 두 개의 크롬 붐은 ELEV-8의 전면을 나타냅니다. 시작하기 전에 아래 비디오를 시청하기를 추천합니다.
필요 도구
• 눈금자 또는 측정 테이프
• 연필이나 펜
• 가위
필요 부품
• 2 - 블루 알루미늄 붐 (# 730-00060)를
• 1 - 크롬 스티커 (# 120-00008)
지시사항들
1. 가까이 구멍이 나있는 붐의 끝에서 붐 2 1/4 "(5.7 cm)에 작은 마크를 만들기 위해 연필을 사용합니다.

2. 크롬 스티커를 두 조각으로 자르는데, 그 크기는 각각 5" (12.7 cm) 와 2 와 1/4 " (5.7 cm) 입니다.
3. 뒷 부분 종이 껍질을 벗기고, 연필 마크와 붐 축이 일직선이 되도록 정렬한 다음 가볍게 눌러줍니다.

4. 붐을 회전시키면서 천천히 벗긴 다음 스티커를 누르면서 붙입니다.
5. 두 번째 붐에 대해서도 반복합니다.
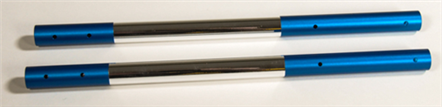
14 단계 : 붐을 통해 확장 와이어 피드
지금, 당신은 붐을 통해 각 모터에 부착된 확장 전선을 공급합니다. 그리고 이것은 손상을 방지하게 될 것입니다.
필요 부품
• 2 - 블루 알루미늄 붐 (# 730-00060)를
• 2 - 알루미늄 붐 크롬 스티커 / w, 13 단계에서 준비
• 4 - 12 단계에서 제조 된 모터 및 모터 마운트 조립,
지시사항들
1. 하나의 붐으로 모터 어셈블리의 3 개 케이블을 붐 안쪽으로 밀어 넣습니다. 확장 전선은 붐 구멍의 또 다른 끝으로 나오게 해야 합니다.

2. 또 다른 세 개의 붐에 대해 이 작업을 반복합니다.

15 단계 : 모터 마운트 및 랜딩 기어를 붐에 장착
붐 조립의 마지막 단계에서 붐 쪽에는 모터 마운트를 고정하고, 랜딩 기어의 한 쪽을 연결합니다.
필요 도구
• # 1 필립스 헤드 드라이버
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
필요 부품
• 4 - 붐 모터 마운트 모터 조립 / w, 단계 14에서 제조 된
• 8 - 잠금 너트, # 4-40 (# 700-00024)를
• 4 - 기계 나사, # 4-40 X 1 "(# 710-00002)
• 4 - 기계 나사, # 4-40 X 1 1/4 "(# 710-00042)
• 4 - 기어 착륙 (# 721-80007)
지시사항들
1. 붐과 모터 마운트의 구멍들을 맞추면서 붐 위로 모터 마운트를 올려 놓습니다.
2. 모터에 가장 가까운 구멍을 통해 1 " 나사를 삽입합니다. 모터에서 가장 먼곳의 구멍으로는 1 1/4 " 나사를 삽입합니다. 나사를 끼우는 동안 저항이 느껴진다면 작업을 중지합니다. 그리고 나사가 쉽게 통과할 수 있을 때까지 나사를 여러 번 비틀어보기 바랍니다. 이것은 붐을 통과하는 전선과 부딛히는 것일 수 있습니다.
3. 모터에 가장 가까운 나사에 너트를 채웁니다. 드라이버 및 렌치를 사용하여, 부품들(너트 또는 나사 머리 포함) 사이의 간격이 더 이상 없을 때까지 (시계 방향으로) 조입니다. 그런 다음 잠금 너트를 한 번 더 전체 회전시키고 멈춥니다. 더 이상은 붐을 파손시킬 수 있습니다.
4. 랜딩 기어의 짧은 쪽을 잡고 다른 나사에 끼운 다음 다른 록 너트로 채웁니다. 밀착 방법은 이전과 동일합니다.

5. 다른 나머지 붐에 대해서도 1-4 과정을 반복합니다.

섹션 4 : 붐과 ESC를 섀시에 장착
모터 조립과 붐 장착으로, 당신은 지금 중앙 섀시에 붐을 장착하고 ESC 를 연결할 준비가 되었습니다. 이 섹션에서는 기술 수준과 장비에 따라 완료하는데 약 1 ~ 2 시간이 소요됩니다.
이 절에 필요한 도구
• # 1 필립스 헤드 드라이버
• 펜치
• 가위 또는 대각선 절단기
• 영구 마커
이 절에 필요한 부품
• 1 - 상부 / 하부 섀시 플레이트 (# 721-80003)
• 4 - 알루미늄 스탠드 오프, # 4-40 X 1 1/4 "(# 710-00042)
• 4 - 기계 나사, # 4-40 X 3/8 "(# 710-00036)
• 4 - 15 단계에서 제조 붐과 모터 어셈블리,
• 8 - 안장 세탁기, 3/4 "(# 712-00010)를
• 8 - 나일론 스페이서, # 4 × 1/8 "(# 713-00019)를
• 8 - 알루미늄 스탠드 오프, # 4-40 X 1/8 "(# 700-00014)를
• 4 - 기계 나사, # 4-40 X 1 1/2 "(# 710-00037)
• 4 - 기계 나사, # 4-40 X 1 1/4 "(# 710-00042)
• 4 - 7 단계에서 제조 된 30A 전자 속도 컨트롤러 (ESC),
• 4 - 지퍼 타이, 4 "블랙 (# 700-00093)를
• 1 - 3.5mm의 파워 브레이크 아웃 케이블에 HXT (# 800-00006)

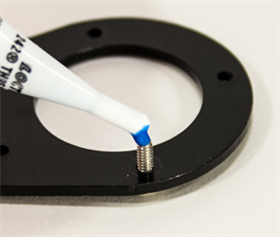
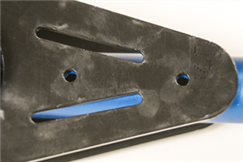
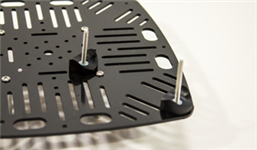
16 단계 : 섀시 판 상단에 FC 마운트 스탠드오프 연결
섀시에 붐 장착을 시작하기 전에, 일단 붐이 부착되면 비행 컨트롤러 (FC)를 부착할 수 없기 때문에, 비행 컨트롤러를 지원할 스탠드오프가 나사로 고정될 필요가 있다.
필요 도구
• # 1 필립스 헤드 드라이버
필요 부품
• 4 - 알루미늄 스탠드 오프, # 4-40 X 1 1/4 "(아래 그림에서 1 번) (# 713-00002)
• 1 - 섀시 플레이트 (# 721-80003) (아래 그림에서 # 2)
• 4 - 기계 나사, # 4-40 X 3/8 "(# 710-00036) (아래 그림에서 # 3)
지시사항들
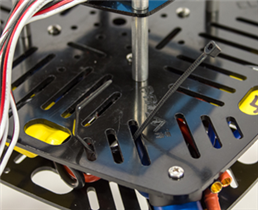
1. 아래 그림에 표시된 구멍 중 하나를 통해 나사를 공급한다. 반대편에서 스탠드오프를 손으로 잡고 드라이버를 사용해서 반대쪽 나사를 꽉 조인다. 엄지 손가락의 규칙으로, 당신이 저항을 느끼기 시작할 때까지 조인다음 다시 한 바퀴 더 전체 회전으로 조입니다.
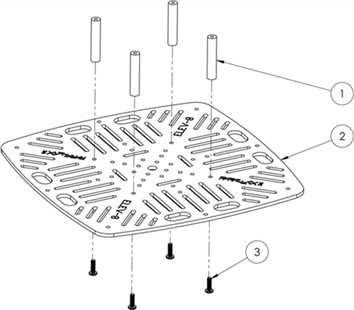
2. 나머지 세 개의 스탠드오프에 대해서도 이 작업을 반복합니다.

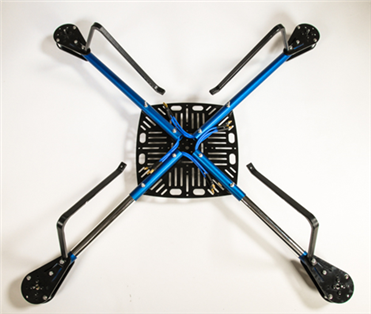
17 단계 : 섀시 판 상단에 붐 어셈블리 마운트
이 단계에서는 모터와 붐 어셈블리를 섀시 판 상단에 부착할 것입니다. 그래서 전기적 연결을 만드는 작업을 시작할 것입니다.
필요 도구
• # 1 필립스 헤드 드라이버
• 펜치
필요 부품
• 4 - 기계 나사, # 4-40 X 1 1/4 " (# 710-00042) (아래 그림에서 1 번)
• 4 - 기계 나사, # 4-40 X 1 1/2 " (# 710-00037) (아래 그림에서 # 2)
• - 1 위 쿼드 섀시, 16 단계에서 제조 (아래 도면에서 # 3)
• 8 - 나일론 스페이서, # 4 × 1/8 "(# 713-00019) (아래 그림에서 # 4)
• 8 - 안장 세탁기, 3/4 "(# 712-00010) (아래 그림에서 # 5)
• 4 - 15 단계에서 제조 붐과 모터 어셈블리, (아래 그림에서 # 6)
• 8 - 알루미늄 스탠드 오프, # 4-40 X 1/8 "(# 700-00014) (아래 그림에서 # 7)
지시사항들
1. 상판 쿼드 섀시를 거꾸로 뒤집어서(FC 스탠드 오프가 아래로 향하게), 붐 위치 중 하나에 대한 두 개의 구멍이 위치하도록 아래 그림을 사용합니다. 청색 원은 1 1/2 " 나사를 위한 위치를 나타내고, 빨간 원은 1 1/4" 나사를 위한 위치를 나타냅니다.
2. FC마운트 스탠드 오프와 동일한 방향으로 나사 머리가 놓이도록, 상위 프레임 판의 각 관통 구멍의 각각으로 나사를 공급합니다.
3. 안장 세탁기 다음 각 나사에 나일론 스페이서를 끼우고 밀어 넣습니다.
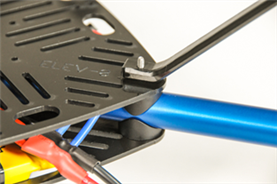
4. 랜딩 기어가 위쪽을 가리 키도록, 나사를 통해 붐을 밀어 넣습니다.
5. 각 나사 위로 스탠드오프를 세웁니다. 스탠드오프가 회전하지 않도록 펜치(또는 flat-nose pliars)로 잡고, 섀시의 바닥에 드라이버를 사용하여 부품들(스탠드오프 또는 나사머리) 사이의 간격이 더 이상 없을 때까지 시계방향으로 조여서 저항이 증가하는 것을 느껴야 합니다. 그런 다음 한바퀴 더 회전을 시키고 멈춥니다. 더 이상 회전하면 붐을 손상시킬 수 있습니다.

6. 나머지 3개의 붐을 위하여 2~5과정을 반복하세요. 크롬 스티커가 붙은 두 붐은 서로 인접한 것을 확인해야 합니다.
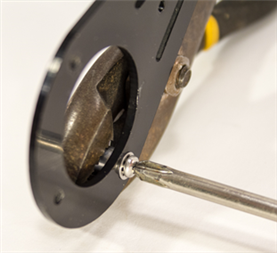
18 단계 : 상단 섀시 플레이트에 ESC 마운트
이 단계에서는 비행 중 이동에서 그들을 방지하기 위해 섀시에 네는 ESC를 부착하는 우편 넥타이를 사용합니다.
필요 도구
• 가위 또는 대각선 절단기
• 펜치
필요 부품
• 1 - 17 단계에서 제조 된 최고 섀시 플레이트와 붐 조립,
• 4 - 7 단계에서 제조 된 30A 전자 속도 컨트롤러 (ESC),
• 4 - 4인치 타이 (# 700-00093)
지시사항들
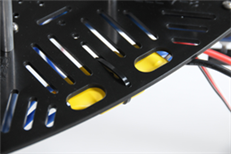
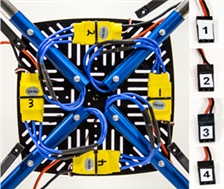
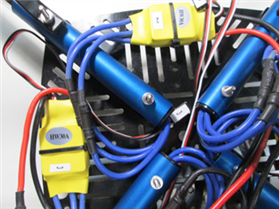
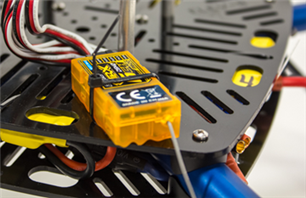
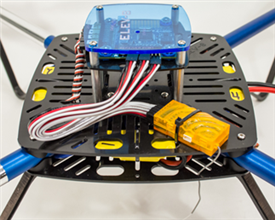
1. 방향에 대한 정렬방법으로 아래의 이미지를 사용하여, 붐 사이의 섀시 플레이트 위 공간으로 ESC 중 하나를 배치합니다.
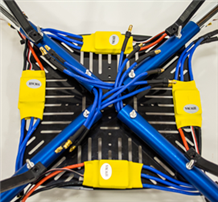
2. 섀시 통해 ESC 주위에 지퍼 타이로 묶습니다. 지퍼 타이는 꽉 잡아 당겨서 단단히 묶습니다. (필요한 경우, 펜치를 사용할 수 있습니다)

3. 지퍼 타이의 꼬리를 자릅니다.

4. 남은 세 개의 ESC 를 장착하기 위해 1-3 단계를 반복합니다.

단계 19 : ESC를 확장 전선에 연결
ELEV-8 상단 섀시 플레이트에 ESC장착하기 위하여ESC로 확장 와이어를 연결하는 작업입니다.
필요 부품
• 1 - 18 단계에서 제조 된 최고 섀시 판과는 ESC / w 조립 붐.
지시사항들
1. 각 ESC는 ESC의 출력 (파란색 선)에 인접한 붐으로 나오는 확장 전선과 연결됩니다.
2. 각 ESC에 대한 세 개의 연결을 만들기 위하여, ESC 출력단자들 중 하나로 확장 전선들로 부터의 연결선들 중 하나씩을 단단히 끼워 넣습니다.

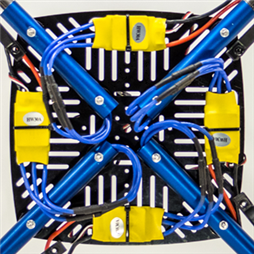
3. 아래 그림과 같이 전선들이 정확하게 보이도록 전선을 배열합니다; 이는 배선의 나머지 작업도 쉽게 할 것입니다.
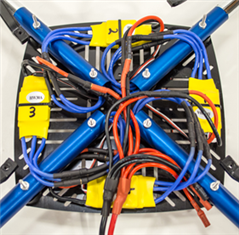
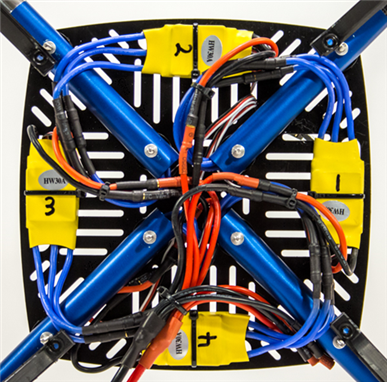
단계 20 : 정면을 결정하고 부품 번호 붙이기
전선의 수와 전가적 연결이 많아 짐에 따라, 그 전기적인 연결을 설정하는데 작은 실수 하기가 더욱 쉬워진다. 이러한 사고 위험을 최소화하기 위해, ELEV-8의 정면에 대하여 모든 전자 부품과 모든 전기적 연결부에 번호를 붙일 것입니다.
필요 도구
• 영구 마커
필요 부품
• 1 - 19 단계에서 제조 된 최고 섀시 판과는 ESC / w 조립 붐,
지시사항들
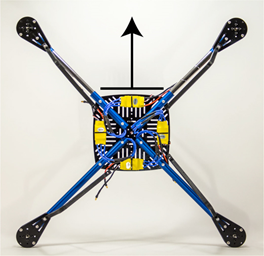
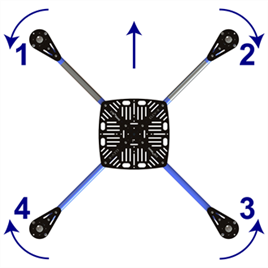
1. 두 크롬 붐이 당신에서 (지금까지) 멀리 향하도록 수직으로 세워서 ELEV-8를 놓습니다. 위의 그림과 같이 ELEV-8의 전면 (정면 방향)은 두 개의 크롬 붐 섀시 방향으로 정의됩니다 (쿼드 이미지에서는 거꾸로 되어 있습니다)
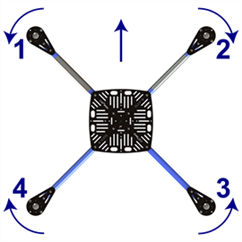
2. 참조를 위해 상기 그래픽을 사용하고(상기 그림에서는 ELEV-8의 정면은 위쪽 방향으로 표시됨), ESC와 ESC 연결을 위한 케이블 커넥터에 대응되는 숫자는 아래 사진을 참고하세요.
3. 아래 그림과 같이 회전 방향을 나타내는 화살표와 각 숫자를 모터 마운트 상부에 표시합니다.

21 단계 : 전원 브레이크 아웃 설치와 ESC연결
"squid" 라고 불리기도 하는 전원 브레이크 아웃 케이블이 배터리에서 4개의 ESC로 전력을 공급할 것이다. 6개의 출력( "출력"은 양극(빨간색)과 음극(검은색) 전선의 쌍이다)중 2개는 사용되지 않고 남겨 둔다. 추후에 비디오 장치나 전등과 같은 확장을 위해 남겨둔 것이다.
경고! ESC에 전원 하네스를 연결할 때 매우 주의해야 합니다. 전선의 극성을 전환하는 것은 배터리 및 / 또는 ESC 에 영구적이고 치명적인 손상을 초래할 것입니다.
필요 부품
• 1 - 20 단계에서 제조 된 최고 섀시 판과는 ESC / w 조립 붐,
• 1 - 3.5mm의 파워 브레이크 아웃 케이블에 HXT (# 800-00006)
지시사항들
1. 거꾸로 뒤지어 지도록 ELEV-8 을 놓습니다.
2. ESC의 빨간색 (양극) 입력을 찾고, 조심스럽게 단단히 각 입력에 빨간색 전원 하네스 와이어를 연결합니다.
3. ESC의 검정색 (음극) 입력을 찾고, 조심스럽게 단단히 각 입력에 검정색 전원 하네스 와이어를 연결합니다.
4. 모든 빨간색 ESC 입력이 모두 빨간색 전원 하네스 와이어에 연결되고, 모든 검은 색 ESC 입력이 모두 검은 색 전원 하네스 와이어를 연결되어 있는지를 한 번 조심스럽게 확인합니다. 아직 전원 하네스를 보호할 필요는 없습니다; 당신은 바닥 섀시 플레이트를 부착하기 바로 직전에 있습니다.
섹션 5 : 송신기, 모터 및 비행 컨트롤러 설정
당신이 기계 조립을 계속하기 이전에, 모터들이 정상적인 방향으로 회전하고 있는지 검토하고 체크해야 합니다. 그렇게 하기 이전에, 송신기와 수신기가 제대로 설정되어야 합니다. 또한 비행 컨트롤러는 ELEV-8을 제어하기 이전에 설정되어야 합니다.
참고 : 당신이 비행 컨트롤러 키트 (# 80202)가 없는 ELEV-8 V2 키트로 작업하고 있다면, 24단계를 건너 뛰어야 합니다. 이 단계는 단지 HoverflyOPEN 비행 컨트롤러 만을 위한 것입니다.
이 섹션에서는 기술 수준 및 장비에 따라 완료하는데 약 45 분에서 1 시간 30 분 정도 소요됩니다.
필요한 부품
• RC 무선 송신기와 수신기 바인딩 플러그 (W / 세부 사항에 대한 소개를 참조하십시오 )
• 리튬 폴리머 (리튬 폴리머) 배터리는 5 단계에서 준비
• 컴퓨터 Windows 운영 체제 및 인터넷
• USB 미니 (B) 케이블에 USB (A) (포함되지 않음)
• HoverflyOPEN 보드 (# 31500)
• ELEV-8 어셈블리, 21 단계에서 제조
22 단계 : 송신기 설정과 수신기 바인딩
무선 송신기는 설정의 압도적인 배열을 갖추고 있습니다. 이 단계는 제대로 ELEV-8을 제어 할 수 있도록 송신기를 설정하는 방법을 안내합니다. 송신기 선택에 상관없이, 아래 표는 ELEV-8 비행을 위한 송신기 설정 권장 사항 테이블입니다. 또한 ELEV-8을 위한 특정 수신기를 제어하는 특별한 송신을 가능하게 하도록 당신의 수신기에 당신의 송신기를 "결합(bind)" 합니다.
필요 부품
• RC 무선 송신기와 수신기 (W 바인딩 플러그 /)
• ELEV-8 어셈블리, 21 단계에서 제조
• 리튬 폴리머 배터리는 5 단계에서 준비
송신기 설정
Box Model Type ACRO (Plane Mode)
End Point (Travel) Adjustment Set aileron and elevator to 50% initially. If the ELEV-8 still seems too reactive, reduce to 30% until you get used to flying it
Dual-Rates (D/R) 100%
Channel Reverse Normal for the following brands: HiTec, Spektrum, JR.
Reverse for the following brands: Futaba
Trims Centered
Sub-Trims Centered
Gain Adjustment Set gain on 5th channel. Start with 25%, add or subtract based on flying stability
Exponential After gaining experience, add up to 30% into aileron and elevator
설정 지시사항들
우리는 SPEKTRUM DX6i, DX7 및 DX8 그리고 ORX T-SIX 송신기에 다음 지시사항들로 설정을 할 수 있도록 여러분을 안내합니다. 시작하기 위하여 아래 목록으로부터 당신의 송신기 유형을 선택하세요. 일단 송신기 설정을 마치면, 페이지를 아래로 내려 수신기 결합 지시사항들을 찾기 바랍니다.
" SPEKTRUM DX6i
" SPEKTRUM의 DX7
" SPEKTRUM의 DX8
" ORX T-SIX
다른 송신기 / 수신기에 대해서는, 제조업체에서 제공하는 문헌을 참조하십시오. 당신이 라디오 컨트롤을 처음 사용하는 경우, 이러한 용어 대부분은 당신에게 외국어로 생각될 수 있습니다. 간결성을 위해 우리는 지금 그 용어로 가지 않지만, 당신이 익숙하지 않은 어떤 용어 나 개념을 찾아보는 시간을 갖기를 강력하게 추천합니다. 모든 시스템이 다르기 때문에, 당신의 RC 송신기 사용 설명서를 준수할 것을 기억하십시오.
SPEKTRUM DX6i 설정에 대한 지침
1. 오른쪽에 있는 "전원"스위치를 밀어 송신기의 전원을 켭니다.
2. "조정 목록"에 접근할 롤러를 한 번 클릭합니다.
3. 오른쪽으로 스크롤로 "모델 선택(Model Select)"을 선택하고 다시 한 번 클릭합니다.
4. 빈 모델을 찾을 때까지 오른 쪽으로 스크롤합니다. ( "Model #" 으로 쓰여져 아무것도 없어야 합니다.).
5. "설정 목록(Setup List)"을 찾을 때까지 오른쪽으로 스크롤하고, 다시 한 번 클릭합니다.
6. "모델 유형(Model Type)" 으로 롤러를 돌리고, 다시 한 번 클릭합니다.
7. 롤러를 회전하여 "아크로(Acro)"를 선택하고, 강조된 부분을 한 번 클릭합니다. (참고 : 불행하게도, 당신이 스크롤 또는 클릭할 때 송신기가 만드는 소음을 해제할 수 있는 방법은 없습니다).
8. 화면의 오른쪽 상단 구석 "목록(List)"을 클릭하여 "설정 목록(Setup List)"으로 되돌아 갑니다.
9. "모델 이름(Model Name)"으로 스크롤하고 한 번 클릭합니다. 롤러는 당신의 모델 이름 사용하세요; 우리는 "ELEV-8 V2"를 제안합니다.
10. 다음 4 초 동안 롤러를 누른 다음 해제하여 메인 화면으로 돌아갑니다.
11. "설정 목록(Adjust List)"으로 들어가기 위해 롤러를 누르고 해제합니다. "Travel Adj"가 강조될 때 까지 롤러를 오른쪽으로 회전한 다음 한 번 클릭합니다.
a. "AILE"설정으로 스크롤; 오른쪽 (aileron/elevator) 스틱이 줄곧 왼쪽을 가도록 잡고 있는 동안, 한 번 클릭하고, 화면이 "50 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다. 오른쪽 (aileron/elevator) 스틱이 줄곧 오른 쪽으로 가도록 잡고 있는 상태에서 지금, 일단 한 번 클릭하고, 화면이 "50 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다.
b. "Elev"설정으로 스크롤; 오른쪽 (aileron/elevator) 스틱을 줄곧 위로 잡고 있는 상태에서, 일단 한 번 클릭하고, 화면이 "50 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다. 오른쪽 (aileron/elevator) 스틱을 줄곧 아래로 잡고 있는 상태에서, 일단 한 번 클릭하고, 화면이 "50 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다.
c. "Gear"설정으로 스크롤; "Gear/Flight Mode" 스위치를 0으로 놓고, 한 번 클릭한 다음, 화면이 "25 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다. 이제 "Gear/Flight Mode" 스위치를 1로 놓고, 한 번 클릭한 다음, 화면이 "25 %"를 읽을 때까지 스크롤한 다음, 다시 저장을 클릭합니다. 당신은 정상 비행 동작을 위하여 "1" 위치에서 스위치를 유지할 필요가 있습니다.
SPEKTRUM DX7 설정에 대한 지침
1. 송신기를 켜는 동안 롤러를 누릅니다. "시스템 설치(System Setup)"이 나타나면 롤러를 놓습니다.
2. (선택 사항)비활성화 또는 송신기 소리를 변경하려고 한다면, "시스템 설정(System setting)"이 강조될 때까지 오른 쪽으로 스크롤한 다음 클릭을 한 번 합니다. "NEXT"가 강조될 때까지 오른 쪽으로 스크롤한 다음 클릭을 한 번 합니다. "Select" 바로 옆의 "Volume control"이 강조될 때까지 오른 쪽으로 스크롤한 다음, 다시 클릭 한 번 합니다. 볼륨 조절을 선택하기 위해 스크롤러를 선택하고 원하는 만큼 조절합니다. "System Setup"으로 돌아가기 위해서는 "List"로 왼쪽으로 스크롤한 다음 한 번 클릭하고 다시 한번 더 클릭하세요.
3. "모델 선택(Model select)"으로 롤러를 돌리고 한 번 클릭합니다. 첫 번째 사용하디 않는 모델로 스크롤하고 한 번 클릭합니다. "새로운 모델을 만들겠습니까(Do you want to creat a new model)" 메시지가 표시되면, "만들기(Creat)" 를 선택합니다.
4. "모델 유형(Model type)"으로 롤러를 돌리고 한 번 클릭합니다. 롤러를 회전하여 "아크로(Acro)"를 선택하고 강조되게 한다음 한 번 클릭합니다. "데이터가 초기화됩니다.(Data will be reset)" 메시지가 표시되면, " Yes"를 선택합니다.
5. "모델 이름(Model name)"으로 스크롤하고 한 번 클릭합니다. 롤러를 사용하여 당신의 모델 이름을 지으십시오(우리는 "ELEV-8 V2"로 제안합니다.); 커서가 편집하려는 문자가 나타날 때까지 스크롤한 다음, 한 번 클릭하고; 다음 편집하려는 문자가 나타날 때까지 스크롤한 다음 한 번 클릭하고 저장합니다. 다음 문자도 스크롤을 움직여 반복하고, 일단 완료되면 오른 쪽 상단의 "Back"으로 스크롤하고 클릭합니다.
6. 오른쪽 위 모서리에서 "메인(Main)"을 스크롤하고 한 번 클릭합니다.
7. 메인 화면에서 송신기 전원을 켜고, "Function List" 로 들어가도록 롤러를 누르고 해제합니다. "서보 설정(Servo setup)"이 강조될 때까지 롤러를 오른 쪽으로 회전시키고 한 번 클릭합니다.
8. 깜박이는 상자가 "AIL"위에 나타날 때까지 오른쪽으로 스크롤한 후 다시 클릭합니다. "50 50" 이 점멸 상자에 표시될 때까지 왼쪽으로 스크롤한 다음, 다시 클릭합니다.
9. 깜박이는 상자가 "ELE"위에 나타날 때까지 오른쪽으로 스크롤한 후 다시 클릭합니다. "50 50" 이 점멸 상자에 표시될 때까지 왼쪽으로 스크롤한 다음, 다시 클릭합니다.
10. 깜박이는 상자가 "GER"위에 나타날 때까지 오른쪽으로 스크롤한 후 다시 클릭합니다. "25" 가 점멸 상자에 표시될 때까지 왼쪽으로 스크롤한 다음, 다시 클릭합니다. 장치의 왼쪽 상단에 있는 "A"스위치를 찾아 다시 전환합니다. 화면의 강조 상자는 이제 다른 "100"을 강조하면, 한 번 클릭합니다. 깜박이는 상자에 "25"표시될 때까지 스크롤하고, 다시 클릭합니다. "기어(Gear)"스위치를 "0"위치로 설정합니다. 당신은 정상 비행 동작을 위해 이 스위치를 "0" 위치로 유지할 필요가 있습니다.
11. "목록(List)"이 선택 될때까지 왼쪽으로 스크롤하고, 클릭합니다. "Main"이 강조될 때까지 왼쪽으로 스크롤하고 다시 클릭합니다. 당신의 DX7 송신기는 이제 완전히 설정되었습니다.
SPEKTRUM DX8 설정에 대한 지침
1. 송신기를 켜는 동안 롤러를 누릅니다. "설정리스트(Setup List)"가 표시되면, 롤러를 놓습니다.
2. "모델 선택(Model select)"까지 롤러를 회전하고, 한 번 클릭합니다. 첫 번째 사용하지 않은 모델로 이동하고 한 번 클릭합니다. (참고 : 불행하게도, 당신이 스크롤하거나 클릭할 때마다 송신기에서 만드는 경고음 소음을 해제할 수 있는 방법은 없습니다).
3. "모델 유형(Model type)"으로 롤러를 돌리고 한 번 클릭합니다. 롤러를 회전하여 "아크로(Acro)"를 선택하고 강조되면 클릭합니다. "데이터가 초기화됩니다.(Data will be reset)" 메시지가 표시되면, " Yes"를 선택합니다.
4. "모델 이름(Model name)"으로 스크롤하고 한 번 클릭합니다. 롤러를 사용하여 당신의 모델 이름을 지으십시오(우리는 "ELEV-8 V2"로 제안합니다.); 커서가 편집하려는 문자가 나타날 때까지 스크롤한 다음, 한 번 클릭하고; 다음 편집하려는 문자가 나타날 때까지 스크롤한 다음 한 번 클릭하고 저장합니다. 다음 문자도 스크롤을 움직여 반복하고, 일단 완료되면 오른 쪽 상단의 "Back"으로 스크롤하고 클릭합니다.
5. 오른쪽 위 모서리에서 "메인(Main)"을 스크롤하고 한 번 클릭합니다.
6. 메인 화면에서 송신기 전원을 켜고, "Function List" 로 들어가도록 롤러를 누르고 해제합니다. "서보 설정(Servo setup)"이 강조될 때까지 롤러를 오른 쪽으로 회전시키고 한 번 클릭합니다.
a. "스로틀(Throttle)"로 오른쪽 스크롤하고 한 번 클릭합니다. "에일러론(Aileron)" 다시 나타날 때까지 오른쪽으로 스크롤하고 다시 클릭합니다. "100 % 100 %"까지 오른 쪽으로 스크롤하고 한 번 클릭합니다. "50 % 50 %" 가 표시될 때까지 왼쪽으로 스크롤하고 다시 클릭합니다.
b. "에일러론(Aileron)"으로 왼쪽으로 스크롤하고 한 번 클릭합니다. "엘리베이터(Elevator)"가 나타날 때까지 오른 쪽으로 스크롤하고 클릭합니다. "100 % 100 %"까지 오른 쪽으로 스크롤하고 한 번 클릭합니다. "50 % 50 %" 가 표시될 때까지 왼쪽으로 스크롤하고 다시 클릭합니다.
c. "엘리베이터(Elevator)" 로 왼쪽 스크롤하고 한 번 클릭합니다. "기어(Gear)"가 나타날 때까지 오른쪽으로 스크롤하고 클릭합니다. "100 %"까지 오른 쪽으로 스크롤하고 한 번 클릭합니다. "25 %"가 표시 될 때까지 왼쪽으로 스크롤하고 다시 클릭합니다. 장치의 왼쪽 상단에 있는 "기어(Gear)"스위치를 놓고 전환합니다. 화면에 강조 상자는 이제 다른 "100 %"를 강조하고, 다음으로 한 번 클릭합니다. "25 %"가 표시 될 때까지 왼쪽으로 스크롤한 다음, 다시 클릭합니다. "기어"스위치는 "0"위치로 설정합니다. 당신은 정상 비행 조작을 위해 스위치를 "0"위치에 유지해야 합니다.
ORX T-SIX 설정에 대한 지침
1. "슬라이딩" 전원 스위치를 위로 올려 송신기의 전원을 켭니다.
2. "기능 목록(Function list)"에 접근하기 위해 롤러를 한 번 클릭합니다.
3. "모델 선택(Model select)"이 강조되도록 오른쪽으로 스크롤하고 다시 클릭합니다.
4. 빈 모델을 찾을 때까지 오른쪽으로 스크롤합니다. ( "모델 #"으로 표시된 기록은 어디에도 없어야 합니다.)
5. "왼쪽 화살표"가 강조될 때까지 왼쪽으로 스크롤하여 종료 "모델 선택(Model select)"을 빠져나옵니다.
6. 롤러와 함께 왼쪽 화살표를 클릭합니다.
7. 이제 다시 "기능 목록(Function list)"로 되돌아가야 합니다.
8. "설정 목록(Setup list)"이 강조되도록 오늘 쪽으로 스크롤하고 다시 클릭합니다.
9. "모델 유형(Model Type)"이 강조되도록 오늘 쪽으로 스크롤하고 다시 클릭합니다.
10. "아크(Arco)"를 선택합니다.
11. "왼쪽 화살표"가 강조되도록 왼쪽으로 스크롤하고, "설정 목록(Setup list)"로 돌아가도록 클릭합니다.
12. "모델 이름(Model name)"을 선택하고 한 번 클릭합니다. 당신의 모델의 이름을 위해 롤러를 사용합니다. 우리는 ELEV 8V2를 제안합니다.
13. 당신 모델 이름지정이 완료되면, "설정 목록(Setup list)"으로 돌아가서 "왼쪽 화살표"를 한 번 클릭합니다.
14. "기능 목록(Function list)"이 강조될 때까지 오른 쪽으로 스크롤하고(화면 2/2), 다음 "기능 목록(Function list)"에서 한 번 더 클릭합니다.
15. "Travel Adjust"가 강조되도록 오른 쪽으로 스크롤하고 한 번 클릭합니다.
16. "스로틀(Throttle)"을 선택하기 위해 아래 방향 스크롤 상태의 송신기의 스로틀(고도) 스틱과 함께 클릭합니다. 그 값이 100%가 나타날 때까지 스크롤합니다. 스로틀 스틱을 위로 들고 100% 값이 표시될 때까지 스크롤합니다. 당신의 설정이 저장되도록 한번 더 클릭합니다.
17. 오른 쪽으로 스크롤해서 "에일러론(Aileron)"을 선택하고, 그 값이 50 %를 표시할 때까지 스크롤합니다. "에일러론(Aileron)" 스틱을 왼쪽으로 잡고, 50 %를 읽을 때까지 스크롤합니다. 당신의 설정이 저장되도록 한번 더 클릭합니다.
18. "표고(Elev)"를 클릭하고 50 %를 읽을 때까지 이동 한 다음 "표고"(피치:Pitch) 스틱이 아래를 향한 상태에서 값이 50 %을 표시할 때까지 스크롤합니다. 당신의 설정이 저장되도록 한번 더 클릭합니다.
19. "기어(Gear)"를 클릭하고 25 %로 설정합니다. "기어 스위치"는 "0"위치로 전환하고, 25 %로 설정합니다. 당신의 설정이 저장되도록 한번 더 클릭합니다.
바인딩 지시사항들
당신의 송신기와 수신기 바인딩에 대한 일반 지시사항들
1. ESC 신호 케이블 중 하나를 수신기의 스로틀 (THRO) 잭에 연결합니다. 올바른 방향으로 와이어를 연결하도록 주의해야 합니다. 올바른 연결을 위해 "^ + -" 와 같은 심벌(기호)가 사용됩니다. ^기호는 흰색 전선에 대응하고, +기호는 빨간색 양극 전선에 대응하고, -기호는 검은색 음극 전선에 해당합니다.
2. 수신기의 바인드 (BND / DAT) 잭으로 수신기와 함께 제공되는 바인드 플러그를 삽입합니다.
3. 송신기 또는 수신기와 함께 제공되는 바인딩 지침을 따르십시오.
SPEKTRUM 송신기와 수신기 바인딩에 대한 지시사항
1. ESC 신호 케이블 중 하나를 수신기의 스로틀 (THRO) 잭으로 연결합니다. 올바른 방향으로 와이어를 연결하도록 주의해야 합니다. 올바른 연결을 위해 "^ + -" 와 같은 심벌(기호)가 사용됩니다. ^기호는 흰색 전선에 대응하고, +기호는 빨간색 양극 전선에 대응하고, -기호는 검은색 음극 전선에 해당합니다.
2. 수신기의 바인드 (BND / DAT) 잭으로 수신기와 함께 제공되는 바인드 플러그를 삽입합니다.
3. 송신기 스위치가 오프되었는지 확인하고, 스로틀은 항상 아래로 내려 놓습니다.
4. ELEV-8에 전원을 공급하기 위해 전원 하네스에 배터리를 연결합니다. 수신기의 LED가 빠르게 점멸해야 합니다.
5. 수신기의 "트레이너 / 바인드" 스위치 / 버튼을 찾고, 송신기을 켜는 동안 "1"위치에 스위치를 잡고 누릅니다. LED의 깜박임이 멈출 때까지 계속 잡고 있어야 합니다. (당신은 최소 수신기로부터 6 피트 (2m) 멀리해야 할 수도 있습니다).
6. 배터리를 분리하고, 바인드 플러그를 제거 하고 송신기 전원을 끄십시오.
ORX T 개의 송신기와 ORX (R620) 수신기 바인딩에 대한 지침
1. 수신기의 "THRO"잭으로 ESC를 삽입합니다. 수신기 (ORX 스티커와 측)의 평평한 면을 향해 (검은 선) "-" 를 정렬해야 합니다.
2. "배틀 / 바인드"잭으로 바인드 플러그를 삽입합니다. 바인드 플러그는 특정 방향을 필요로 하지 않습니다.
3. 당신의 ELEV 8 리튬-폴리머 배터리를 연결합니다. 이때 수신기의 상태 LED가 계속 깜박입니다.
4. 당신의 스로틀 스틱을 아래로 향하도록 확인하고, 다음으로 송신기를 ON 으로 전환합니다. 이때 송신기와 수신기는 자동으로 바인딩 과정을 시작합니다.
5. 상태LED가 점멸을 중지하면, 결합이 완료됩니다.
6. 배터리를 분리 ESC를 제거하고 플러그를 결합합니다.
23 단계 : 모터의 회전 방향 구성
지금 당신은 모터가 원하는 방향으로 회전하고 있는지를 확인합니다. 어떤 모터가 잘못된 방향으로 회전하는 경우, 그 문제를 해결하기 위해 ESC의 두 개 출력을 서로 교체하는 간단한 문제이다.
경고! 프로펠러는 모터에 장착하지 않아야 합니다. 어떤 이유로 장착되어 있다면, 진행하기 전에 즉시 제거해야 합니다.
필요 부품
• RC 무선 송신기와 수신기
• ELEV-8 어셈블리, 21 단계에서 제조
• 리튬 폴리머 배터리는 5 단계에서 준비
지시사항들
1. ELEV-8를 위로 세워서 당신으로부터 멀리 거리를 둡니다.
2. 수신기의 스로틀 채널로 ESC의 신호 케이블을 연결합니다. (당신이 선택하는 ESC 케이블이 어떤 것인지는 중요하지 않지만, 그것을 추적하도록 기억해야 합니다.) 올바른 연결을 위해 "^ + -" 와 같은 심벌(기호)가 사용됩니다. ^기호는 흰색 전선에 대응하고, +기호는 빨간색 양극 전선에 대응하고, -기호는 검은색 음극 전선에 해당합니다.
3. 송신기를 스위치합니다. (스로틀이 계속 아래방향으로 내려져있는지 확인해야 합니다). ELEV-8에 하니스 와이어로 배터리를 연결합니다. 당신은 여러 번 ESC의 삐 소리를 들어야 합니다.
4. 아주 천천히, 모터가 회전을 시작할 때까지 송신기의 스로틀 방향을 위로 들어 올립니다. 그리고 회전방향을 관찰하고 스로틀을 아래 방향으로 내리고 배터리를 분리합니다.
5. 아래의 그림과 같이 표시된 회전방향과 뵤교하시오. 만약 그림에 표시한 것처럼 동일한 방향으로 회전했다면 지시사항 9로 이동합니다.
6. 모터가 올바른 방향으로 회전하지 않은 경우, ELEV-8을 뒤집어서 문제의 모터에 연결된 ESC의 번호를 찾습니다.
7. ESC를 실행하는 (3 개) 청색 확장 전선의 임의의 두 개 전선을 찾아서 그들을 뽑습니다.

8. 두 개의 확장 전선을 서로 전환하고 다시 꽂습니다. 이제 그 모터의 회전 방향을 수정했습니다.

9. 나머지 3 개의 모터/ESC에 대해서도 필요하다면 지시사항 1-8 과정을 반복하세요.
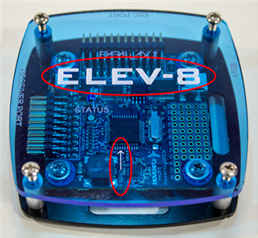
단계 24 : 비행 컨트롤러 설정
비행 컨트롤러 (FC)가, 여기서는 HoverflyOPEN, ELEV-8의 "두뇌"이다. 그것을 탑재 한 Parallax 프로펠러 1 마이크로컨트롤러 는 그것을 처리하는 무선 수신기에서 온 보드 3축-자이로스코프로부터 데이터를 교환하고, ELEV -8이 안정적으로 비행하도록 신호를 수신한다. 이 모든 작업을 다 수행하기 이전에, ELEV-8을 컴퓨터를 사용하여 설정해야만 합니다.
이 단계는 HoverflyOPEN 제어 보드를 사용하는 사용자 만을 위한 단계입니다. 다른 비행 컨트롤러를 프로그래밍하기 위해 이 지시사항들을 따르지 마십시오.
경고! 인쇄 회로 기판 (PCB)은 의 전자 회로를 파괴 할 수 있는 정전기 방전 (ESD)에 민감합니다. 이 위험을 최소화하기 위해, 합성 옷을 피하고, 취급하기 이전에 수도꼭지 또는 다른 접지된 금속 물체를 만지십시오.
필요 도구
• Windows 운영 체제 컴퓨터 와 인터넷
• USB 미니 (B) 케이블에 USB (A) (포함되지 않음)
필요 부품
• HoverflyOPEN 보드 (# 31500)
경고! 컴퓨터에 연결되어있는 동안 당신 컴퓨터USB포트가 과부하될 것이기 때문에, HoverflyOPEN 보드로 배터리 또는 ESC를 연결하지 마십시오.
지시사항들
1. Hoverfly펌웨어 업데이트를 바로 시작하려면 이 링크를 따라가세요.
2. 당신은 다음과 같은 경고 대화 상자를 얻을 수 있다 "당신의 컴퓨터에 해를 끼칠 수 있는 파일 유형이고, 당신이 Hoverfly 펌웨어 업데이트 Client.application을 계속하시겠습니까?". "예"/ "계속"을 클릭합니다.
3. 다운로드가 완료되면, "Hoverfly 펌웨어 업데이트 Client.application" (일반적으로 화면의 하단에 있는 또는 당신의 다운로드 폴더)을 클릭합니다.
4. 당신이 다운로드 받은 소프트웨어 파일이 없다는 오류가 발생하는 경우, 이 링크를 따라 Hoverfly의 고객 다운로드 페이지로 가서 페이지 하단의 "설치"를 선택합니다.
5. 당신은 ... "게시자를 확인할 수 없습니다"는 보안 경고가 발생할 수 있습니다. "설치"를 클릭합니다.
6. 설치가 완료되면, " Hoverfly Update Client" 윈도우 창이 나타나야 합니다.
7. 그 ESD 안전 가방에서 HoverfyOPEN를 제거합니다.
8. 당신의 HoverflyOPEN 보드 USB 포트에 USB 미니 케이블을 연결하고 컴퓨터에 다른 쪽 끝을 연결합니다. 이 보드는 주기적으로 경고음이 울리고, LED가 깜박입니다.
9. Hoverfly 업데이트 클라이언트 창 하단 사용권 계약에 동의하고 클릭합니다.
10. 드롭 다운 목록에서 "Board" 아래의 "HF Open"를 선택합니다. 그런 다음 "Next"를 클릭합니다.
11. 드롭 다운 목록에서 "Mode" 아래의 "X"를 선택합니다. 그런 다음 "Next"를 클릭합니다.
12. 이제 HoverflyOPEN 보드가 컴퓨터에 연결되어 있는지 확인합니다(30 초 이상 걸리지 않습니다). 만약 연결되지 않는 경우, 제공된 링크를 사용하여 더 많은 최신 드라이버를 다운로드 해야 할 수 있습니다. 참고 : 당신의 보드는 제공되는 사진과 일치하지 않습니다. 그러면 "Next"를 클릭합니다.
13. 드롭 다운 목록에서 "Software Version" 아래의 "2.0"을 선택합니다. 그런 다음 "Flash"를 클릭합니다.
14. 플래시가 완료되면, "플래시 로그"는 "성공"을 읽고, 당신은 당신의 컴퓨터에서 보드를 분리하고 Hoverfly 업데이트 클라이언트를 종료할 수 있습니다.
15. ESD 안전 가방에 HoverflyOPEN를 돌려 놓습니다.
섹션 6 : 최종 배선 및 아래쪽 섀시 플레이트 부착
ESC / 모터 방향이 제대로 설정되면, 당신은 바닥 섀시 플레이트 장착 준비하기 위한 모든 전선을 확보할 준비가 된 것입니다.
이 섹션에서는 기술 수준과 장비에 따라 약 30 분에서 1 시간 정도 소요됩니다.
필요한 도구
• 펜치
• 대각선 절단기 ( "제방") 또는 가위
• # 1 필립스 헤드 드라이버
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
필요한 부품
• ELEV-8 어셈블리, 21 단계에서 제조
• 4 - 타이, (4) "우편 번호 (# 700-00093)
• 1 - 바닥 섀시 플레이트 (# 721-80003)
• 8 - 안장 세탁기, 3/4 "(# 712-00010)
• 8 - 잠금 너트, # 4-40 (# 700-00024)
25 단계 : 섀시를 통한 ESC 신호 케이블 경로
ESC 신호 케이블은 결국 비행 컨트롤러에 연결해야 합니다. ESC가 비행 제어기로부터 탑 섀시 판의 반대측에 있으므로, 연결되기 이전에 그들은 먼저 탑 샤시 플레이트의 구멍을 통해 공급되어야 합니다.
필요 부품
• ELEV-8 어셈블리, 21 단계에서 제조
지시사항들
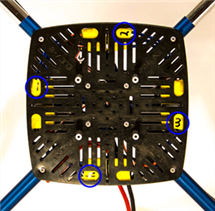
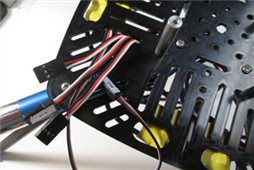
1. ELEV-8이 거꾸로 하고 있도록 놓습니다.
2. 섀시의 중심을 향해, 와이어 하네스와 파란색 전선 아래로 # 3 ESC에서 신호 케이블을 넣습니다.
3. 이제 아래와 같이 하네스 전선과 모든 파란색 전선 아래로 놓이도록, # 2 ESC를 향해 케이블을 피드합니다.
4. ESC # 1 및 # 4에 대해서 와 지시 2와 3을 반복합니다.; 중심으로 신호 케이블을 공급하면, ESC # 2 방향이 됩니다.

5. 하나씩, 탑 샤시 플레이트의 슬롯 중 하나를 통해 ESC # 2의 오른쪽으로 전선들을 밀어 넣습니다.

26 단계 : 다른 모든 전선들의 경로 및 고정
바닥 섀시 플레이트를 장착하기 전에, 그들이 판에 의해 조이거나 비행 중 느슨해되지 않도록 모든 전선을 보호할 필요가 있다.
필요 도구
• 펜치
• 대각선 절단기 또는 가위
필요 부품
• 4 - 4인치 타이 (# 700-00093)
• ELEV-8 어셈블리, 25 단계에서 제조
지시사항들
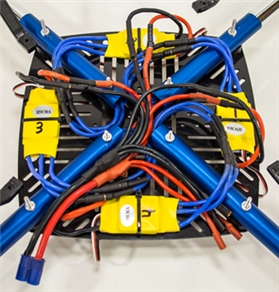
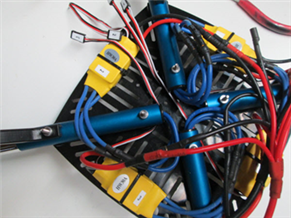
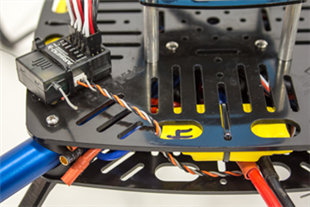
1. ELEV-8 을 거꾸로 뒤집어 놓는다. 다음 이미지와 일치하도록 와이어 하네스를 놓는다. 단지 파란색 ESC 출력 전선들은 붐을 통해 연결되어 있는지 확인하십시오.
2. ESC # 1의 입력 선에서 붐 # 4로 실행되는 확장 전선을 보호하기 위해 타이를 사용합니다.

3. ESC # 2의 입력 선에서 붐 # 1로 실행되는 확장 전선을 보호하기 위해 다른 타이를 사용합니다.

4. ESC # 3의 입력 선에서 붐 # 2로 실행되는 확장 전선을 보호하기 위해 다른 타이를 사용합니다.

5. ESC # 4 와 와이어 하네스 입력 선에서 붐 # 1로 실행되는 확장 전선을 보호하기 위해 다른 타이를 사용합니다.

27 단계 : 본체 바닥 섀시 플레이트를 본체 장착
마지막으로, 당신은 본체 하단 섀시 플레이트를 탑재하고 랜딩 기어를 보호 할 수 있습니다.
필요 도구
• # 1 필립스 헤드 드라이버
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
필요 부품
• 8 - 잠금 너트, # 4-40 (# 700-00093) (아래 그림에서 1 번)
• 1 - 바닥 섀시 플레이트 (# 721-80003) (아래 그림에서 # 2)
• 8 - 3/4 " 새들 와셔 (# 712-00010) (아래 그림에서 # 3)
• 4 - 단계 26에서 제조 ELEV-8 조립, (아래 그림에서 # 4)
지시사항들
1. ELEV-8 을 거꾸로 뒤집어 놓습니다.
2. 붐을 통해 실행된 나사 위에 새들 워셔를 놓습니다.

1. 그것이 어떤 전선이 끼지 않도록 하고 접시에 쓰기가 윗쪽으로 되어 있는지 확인하고, 나사를 통해 바닥 쿼드 섀시를 밀어 넣습니다.
2. 네 개의 센터 나사 위에 나사 록 너트를 놓습니다. (아직 조일 필요는 없습니다).
3. 외부 나사를 통해 랜딩 기어를 놓습니다.
1. 네 개의 외부 나사 위에 록 너트를 놓습니다.

1. 모두 8 개의 나사를 렌치를 사용하여 조입니다. 당신은 회전하는 동안 (상위 섀시 접시) 나사 머리를 유지하기 위해 드라이버를 사용할 필요가 있습니다.

섹션 7 : 비행 컨트롤러와 수신기 설치
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
기계적 어셈블리가 완료된 상태로, 제어 시스템으로 이동하는 시점이다. 만약 송신기의 조이스틱을 움직일 때, 차례로 행 제어기에 신호를 보내는 수신기에 의해 수집된 무선 신호를 브로드 캐스트한다. 그리고 나서 모터에 전력을 공급하는 ESC로 신호를 전송하기 전에 내부 센서와 조합 된 신호를 처리한다. 송신기와 함께 섹션 5에서 설정한 비행 컨트롤러는, 이 시스템의 "심장" 이고 그 곳에서 시작합니다.
이 섹션에서는 기술 수준과 장비에 따라 약 45 분에서 1 시간 30 분 정도 소요됩니다.
필요한 도구
• # 1 필립스 헤드 드라이버
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
• 와이어 커터 또는 대각선 절단기
• 날카로운 칼, 면도날, 또는 사포 (모래 80 ~ 200)
필요한 부품
• 1 - Hoverfly OPEN 비행 컨트롤러 / W 그로멧(Grommets) (# 31500)
• 1 - 비행 컨트롤러 장착 판 (# 721-80002)를
• 4 - 기계 나사, # 4-40 X 1/2 "(# 710-00006)
• 4 - 금속 와셔, # 4 (# 712-00002)
• 4 - 잠금 너트, # 4-40 (# 700-00024)를
• ELEV-8 조립 단계 27에서 제조
• 1 - 비행 컨트롤러 커버 플레이트 (# 721-80010)를
• 4 - 기계 나사, # 4-40 X 1 "(# 710-00002)
• 4 - 알루미늄 스페이서, # 4 × 2 "(# 713-00007)를
• 1 - RC 무선 수신기
• 5 - 서보 케이블, 8 "(# 800-00080)를
• 2 - 4인치 타이 (# 700-00093)

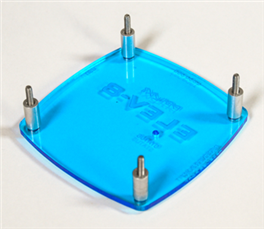
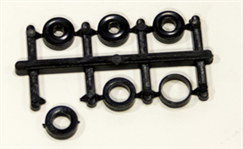
28 단계 : 비행 컨트롤러에 그로멧(Grommets) 맞추기
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
비행 컨트롤러 (HoverflyOPEN)는 진동에 매우 민감한 자이로스코프 센서를 가지고 있어서, 정확도에 부정적인 영향을 줄 수 있습니다. 이러한 진동을 줄이기 위해 HoverflyOPEN는 장착 구멍에 맞는 고무 고리와 함께 사용됩니다.
일부 보드는 함께 사전 설치되어 있습니다.; 즉 당신의 HoverflyOPEN인 경우, 당신은 이 단계를 건너 뛰어 단계 29로 이동할 수 있습니다.
필요 부품
• HoverflyOPEN 비행 컨트롤러 / W 그로멧 (# 31500)
지시사항등
1. 그 ESD 안전 가방에서 HoverflyOPEN를 제거합니다.
2. 한 손으로 HoverflyOPEN을 잡고, 어떤 핀도 구부러지지 않도록 조심합니다.
3. 다른 손을 사용하여, 고리 중 하나를 잡고, 네 개의 Garmet 구멍 중 하나를 통해 밀어 넣어 다른 한 쪽으로 짜냅니다.

4. Garmet이 구멍에 제대로 자리잡을 때까지 필요한 만큼 Garmet의 플랜지를 밀고 당깁니다.
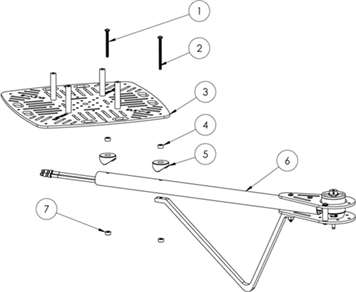
29단계 : 비행 컨트롤러와 아래 마운트 결합
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
필요 도구
• # 1 필립스 헤드 드라이버
• 1/4 "렌치, 1/4"소켓, 또는 조절 렌치
필요 부품
• 4 - 기계 나사, # 4-40 X 1/2 " (# 710-00006) ( 아래 조립 도면에 # 1)
• 4 - 금속 와셔, # 4 (# 712-00002) (아래 조립 도면 # 2 )
• HoverflyOPEN 보드가 설치되고, 단계 28에서 준비 (아래 조립 도면에서 # 4 # 3 )
• 1 - 비행 컨트롤러 장착 판 (# 721-80002) ( 아래 조립 도면 # 5)
• 4 - 잠금 너트 # 4-40 (# 700-00024) ( 아래 조립 도면 # 6)
지시사항들
1. 마운트 접시 위에 HoverflyOPEN을 놓고 나사 구멍을 맞춥니다.

2. 나사 위에 와셔를 밀어넣고 HoverflyOPEN 및 마운트 접시에 4 개의 구멍 중 하나를 통해 삽입합니다.
3. 록너트를 놓고 더 이상 간격이 없을 때까지 단단히 조입니다. Grommet가 압력을 받도록 조이지는 마세요.
4. 나머지 구멍에 대해서도 지시사항 2 와 3을 반복하시오.
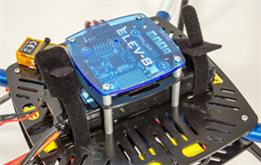
30 단계 : 상단 섀시 판에 FC 어셈블리 마운트
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
이제 HoverflyOPEN 비행 컨트롤러 어셈블리 및 ELEV-8 어셈블리에 비행 컨트롤러 덮개를 장착합니다.
필요 도구
• # 1 필립스 헤드 드라이버
필요 부품
• 4 - 기계 나사, # 4-40 X 1 "(# 710-00002) (아래 조립 도면에서 # 1)
• 1 - 비행 컨트롤러 커버 플레이트 (# 721-80010) (아래 조립 도면에 # 2)
• 4 - 알루미늄 스페이서, # 4 × 2 "(# 713-00007) (아래 조립 도면에 # 3)
• HoverflyOPEN 비행 컨트롤러 어셈블리 (아래 조립 도면에서 # 4) 단계 29에서 제조
• ELEV-8 어셈블리 (아래 조립 도면에 # 5) 단계 27에서 제조
지시사항들
1. ELEV-8이 위로 향하도록 정렬합니다.(크롬 스티커가 붙은 붐은 당신으로부터 멀게).
2. FC 상판을 통해 네 개의 나사를 밀어 넣고, 4 개의 스페이서를 끼웁니다.
3. FC마운트 어셈블리 위에 이 어셈블리를 놓고, 나사구멍을 일렬로 맞춥니다. 상판의 글자가 당신 방향으로 정렬될 때 FC 화살표가 당신으로부터 멀어지는 방향인지 확인합니다.
4. 이 어셈블리를 잡고 ELEV-8 어셈블리의 스탠드 오프 위에 놓습니다. 위의 지시에 따라 ELEV-8 을 정렬하고, FC의 화살표가 당신으로부터 멀리지도록 지정해야 합니다 (ELEV-8의 전방).
5. 당신의 드라이버로 스탠드 오프 나사를 잡고 조입니다. 너무 세게 조이지 마십시오.

31 단계 : ESC 신호 케이블을 비행 컨트롤러에 연결
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
이제 전자 속도 제어를 위한 신호케이블을 시작으로, 비행 전자와 HoverflyOPEN 비행 컨트롤러 사이의 최종 연결을 시작합니다.
필요 부품
• 단계 30에서 준비된 ELEV -8 조립체
지시사항들
1. ELEV-8을 위로 똑바로 세웁니다.
2. HoverflyOPEN 비행 컨트롤러 (당신에게 가장 가까운 측)의 전면으로 "ESC 포트"(비행 컨트롤러 덮개 판에 표시된대로) 의 핀을 놓습니다.
3. 검은 색 전선은 왼쪽에 흰색 전선은 오른쪽에 있도록 수평으로 배열한 다음, 당신이 "3"으로 표시한 ESC 신호 케이블을 잡고 왼쪽 아래 핀으로 삽입합니다.

4. 올바른 순서를 위해 위의 이미지를 사용하고 같은 방향을 유지하면서 나머지 세 개의 신호 케이블을 연결합니다.

32 단계 : 수신기 신호 케이블을 연결
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
이 단계에서는 HoverflyOPEN 비행 컨트롤러와 수신기 모두에 수신기를 위한 신호 케이블을 연결합니다.
필요 도구
• 날카로운 칼, 면도날, 또는 사포 (모래 80 ~ 200)
필요 부품
• 1 - RC 라디오 수신기 (제공되는 이미지는 오렌지 RX 수신기이다; 수신기가 다를 수 있습니다)
• 5 - 서보 케이블, 8 "(# 800-00080)를
• ELEV-8 회의는 31 단계에서 제조
지시사항들
1. 수신기를 잡고 기기에 케이블을 연결하기 위해 올바른 방향을 결정해야 합니다. 올바른 연결을 위해 "^ + -" 와 같은 심벌(기호)가 사용됩니다. ^기호는 흰색 전선에 대응하고, +기호는 빨간색 양극 전선에 대응하고, -기호는 검은색 음극 전선에 해당합니다. 대부분의 SPEKTRUM 오렌지 RX 및 Futaba 수신기 에 대해서, 흰색 신호선은 아래 이미지처럼 상부에 놓는다.

2. 당신은 수신기 (SPEKTRUM의 recievers에는 필요하고, OrangeRX의 recievers에 대해서는 필요하지 않음)에 그들에 맞는 각도로 신호 케이블의 두 개 바닥 가장자리를 잘라야할 수 있습니다. 날카로운 칼날로 아래 두 개의 모서리를 깎아내거나, 또는 사포를 사용하여 갈아낼 수 있습니다. 아래의 세 번째 그림과 같이 결과가 나타납니다.
3. 지시사항 1에서 결정된 정렬방향을 유지하면서, 신호 케이블안으로 스로틀, 에일러론, 엘리베이터, 러더 및 기어 채널을 끼웁니다. (종종 THRO, AILE, ELEV, RUDD, 그리고 GEAR과 같은 약어) 기어, 각각으로 약칭 함).
4. 이제, (상판에 "리시버 포트"가 기록되어 있음) HoverflyOPEN 비행 컨트롤러의 왼쪽에 있는 수신기 신호 케이블의 핀을 찾습니다.

5. 아래의 이미지를 참고로 사용하여, 케이블을 조심스럽게 끼우고, 방향과 순서에 주의합니다.

33 단계 : 상단 섀시 판에 수신기 마운트
중요! 당신이 비행 컨트롤러 키트가 없는 ELEV-8 V2 (# 80202)인 경우라면, 제 7조의 지시사항들은 특별히 Hoverfly 제어보드만을 연결하고 설치하기 위해 이용하세요. 다른 제어 보드의 일부 또는 모두 적용하려고 시도하는 경우 주의하십시오. Parallax는 Parallax가 판매하거나 제공하지 않은 부품으로 본 지시사항들을 따르는 것에 대하여 책임을 지지 않습니다.
HoverflyOPEN 비행 컨트롤러에 수신기가 연결하고, 상단 섀시 판으로 그 것을 마운트할 때입니다.
필요 도구
• 대각선 절단기 ( "제방") 또는 가위
필요 부품
• 2 - 타이, (4) "우편 번호 (# 700-00093)
• ELEV -8- 조립체는 단계 32에서 제조
지시사항들
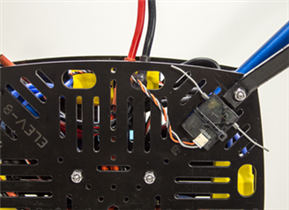
1. 아래의 형태로 타이의 끝을 구부리기 위해 손가락을 사용합니다.

2. 아래 그림과 같이, 탑 섀시 판의 뒷면 왼쪽 모서리를 통해 타이를 끼웁니다. 다른 수신기를 사용하는 경우, 당신은 타이의 간격을 선택할 필요가 있을 수 있고, 그 다음에 구멍으로 끼워 넣습니다.
3. 타이에 수신기를 놓고 조입니다.
4. 타이의 "꼬리"를 자릅니다.
위성 수신기에 대한 지시사항
당신의 수신기가 위성 모듈인 경우 아래 그림과 같이 마운트할 수 있습니다.
섹션 8 : 배터리 부착
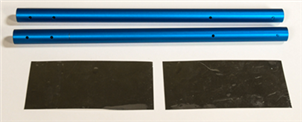
이제 배터리 끈과 거품 패드(거품 패드 선택 사항) 를 추가해서 ELEV-8 섀시에 리튬-폴리머 배터리를 보호할 때입니다. 여기에서 우선 순위는 ELEV-8 가 불균형해지고 충돌의 가능성을 증가시키는 배터리가 비행 중 이동하지 않도록 하는 것입니다.
이 섹션에서는 기술 수준과 장비에 따라, 약 10 분 내지 30 분이 소요됩니다.
필요 도구
• 가위
필요한 부품
• ELEV-8 조립 단계 (33)에서 제조
• 2 - 후크 & 루프 스트랩 (# 900-00021)
• 2 - 접착식 폼 패딩, 약 1 "(2.5 cm) 폭 2"(5cm) 길이와 3/8 "(1cm) 두께
• 1 - 5 단계에서 제조된 리튬-폴리머 배터리,

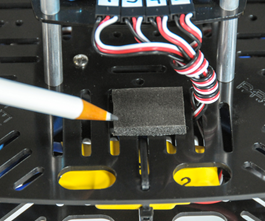
34 단계 : 상단 섀시 플레이트로 폼 패드 마운트
두 개의 후크와 끈으로 배터리를 보호하면서, 몇몇 사용자들은 배터리 아래에 두 개의 폼 패드를 추가하여 추가 보호를 선호한다. 배터리를 단단히 보호하기 위해 폼 패드를 추가하면 동시에 배터리의 미끄럼을 방지할 수도 있다. 이런 이유로 이 단계는 선택사항이고, 폼 패드는 키트의 구성품에는 포함되지 않는다.
필요 도구
• 가위
필요 부품
• ELEV-8 조립 단계 (33)에서 제조
• 2 - 접착식 폼 패딩, 약 1 "(2.5 cm) 폭 2"(5cm) 길이와 3/8 "(1cm) 두께
지시사항들
1. ELEV-8 을 똑바로 세워 당신으로부터 떨어져서 직면하게 한다.
2. 폼 패딩의 조각 중 하나에서 보호 종이 뒷면을 제거하고 아래 그림과 같이, 단지 비행 컨트롤러 뒤에 탑 섀시 판에 붙입니다.

1. 지금 당신을 향하도록 ELEV-8을 돌립니다.
2. 폼 패딩의 다른 부분에서 보호 종이 뒷면을 제거하고 아래 그림과 같이, 단지 비행 컨트롤러 앞의 탑 샤시 판에 붙입니다.
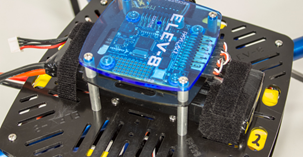
35 단계 : 섀시를 통해 스트랩 스레드
섀시를 통해 배터리를 고정하는 데 사용되는 두 개의 끈을 스레드합니다.
필요 부품
• 단계 (34)에서 조립된 ELEV -8- 어셈블리
• 2 - 후크 & 루프 스트랩 (# 900-00021)
지시사항들
1. ELEV-8 를 똑바로 세웁니다.
2. 끈 중 하나의 좁은 끝을 잡고, 아래 그림처럼 상단 섀시 플레이트의 슬롯을 통해 공급합니다.

3. 여섯 자리 떨어진 현재의 슬롯에 다시 끈을 삽입하고 섀시를 통해 공급합니다.


4. 이 똑바로 세워 당신을 멀리 향하도록 ELEV-8을 돌립니다.
5. 지금 직면하고 있는 비행 컨트롤러의 측면에 두 번째 스트랩을 설치하는 동일한 절차를 진행합니다.

36 단계 : 섀시의 배터리 보호
이제 섀시 위에 배터리를 설치하는 시간이다. 벨크로 끈 덕분에 쉽게 충전 및 저장을 위해 제거 될 수 있다.
필요 부품
• ELEV-8 조립 단계 35에서 제조
• 1 - 5 단계에서 제조 된 리튬-폴리머 배터리,
지시사항들
1. ELEV-8 를 위로 똑바로 세웁니다.
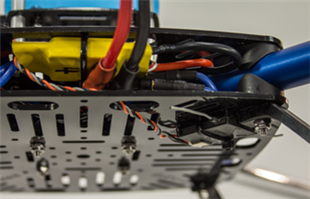
2. 비행 컨트롤러 마운트 아래 배터리를 끼우고, 배터리 리드가 ELEV-8의 뒷면을 마주 보게 합니다.
3. 손에 끈의 한쪽 끝을 잡고 단단히 당긴 다음, 안전하게 아래로 눌러서 가볍게 조입니다.

4. 나머지 배터리 끈도 2-3단계를 반복합니다.
섹션 9 : ESC 동기화 및 프로펠러 마운팅
전기 기계 조립체의 마지막 부분에서, ESC 동기화는 라디오 제어 시스템의 다양한 검사를 수행하고, 프로펠러 어댑터와 프로펠러에 나사를 조일 것이다.
이 섹션에서는 기술 수준과 장비에 따라 약 15 분에서 1 시간 정도 소요됩니다.
필요한 도구
• # 1 필립스 헤드 드라이버
• 5/16 "렌치, 5/16"소켓, 또는 조절 렌치
• 펜치
필요한 부품
• RC 라디오 송신기는 단계 22에서 제조 된
• 리튬 폴리머 배터리는 5 단계에서 준비
• 4 - 프로펠러 어댑터 잠금 너트는, 각각의 모터 (아래 조립 도면에 # 1)에 포함
• 4 - 프로펠러 어댑터 세탁기, 각 모터 (아래 조립 도면 # 2)에 포함
• 2 - 1045C (시계 반대 방향) 프로펠러 (# 721-80000) (아래 조립 도면 # 3)
• 2 - 1045CR (시계 방향) 프로펠러 (# 721-80001) (아래 조립 도면 # 3)
• 16 - 플랫 헤드 십자 나사 (M2)의 x12mm 각 모터 (아래 조립 도면 # 4)에 포함
• 4 - 프로펠러 스페이서 링, 각각의 프로펠러 (아래 조립 도면 # 5)에 포함
• 4 - 프로펠러 어댑터는 각각의 모터 (아래 조립 도면 # 6)에 포함
• ELEV-8 어셈블리 (조립 아래 그림에서 # 7) 단계 36에서 제조

37 단계 : ESC 동기화 및 범위 확인
프로펠러를 장착하기 전에 ESC와 송신기 사이의 최대 및 최소 스로틀 신호를 동기화해야 합니다. 그런 다음, 당신은 당신의 송신기와 수신기가 제대로 작동하는지 확인하는 라디오 컨트롤 시스템 범위 검사를 수행해야 합니다. 이 단계는 종종 간과되지만, 이 검사를 수행하는 데 실패하면, 상당한 그리고 종종 위험한 결과를 초래할 수 있습니다.
필요 부품
• RC 라디오 송신기는 단계 22에서 제조
• 당신의 RC 무선 송신기를위한 매뉴얼
• 리튬 폴리머 배터리는 5 단계에서 준비
• ELEV-8 조립 단계 (36)에서 제조
지시사항들
1. 송신기를 켜고 5 채널이 올바른 값에 있는지 확인합니다.
• SPEKTRUM DX6i 송신기에는, 기어 스위치가 꺼져 있어야 합니다.
• SPEKTRUM DX7 및 DX8 송신기에는, 기어 스위치는 꺼집니다.
• ORX-T-SIX 송신기에는, 기어 스위치가 OFF (1 위치)되어야 한다.
2. 송신기의 스로틀 채널 트림이 제로에 있는지 확인합니다. 당신의 ELEV-8 리튬-폴리머 배터리는 아직 연결되지 않아야 합니다.
3. 스로틀 스틱이 항상 최대 스로틀 움직여져 있어야 합니다.
4. ELEV-8에 전원을 공급하는 전원 브레이크 아웃 케이블에 배터리를 연결합니다.
5. 두 번의 비프 음이 들립니다. 경고음 후 즉시, 스로틀을 아래로 끝까지 이동합니다. 당신은 ESC가 올바르게 동기화된 것을 확인하는 한 번의 더 긴 비프음 소리를 들어야 합니다.
6. 배터리전원을 껐다가 다시 ELEV-8에 전원을 연결하는 전원 사이클을 수행한다.
7. 다양한 검사를 수행하기 위해 RC 무선 송신기 사용 설명서의 지시 사항을 따르십시오.
SPEKTRUM DX8과 ORX T SIX 송신기에 대한 지침을 확인.
1. 전원이 연결된 ELEV-8에서 약 30 보 (90 피트 / 30m) 멀리 떨어져 있는다.
2. 정상 비행 위치에서 송신기로 ELEV-8를 마주 본다.
• SPEKTRUM DX7 및 DX8 송신기의 경우, 주 화면에서 한 번 스크롤 휠을 클릭하여 "기능 목록(Function list)"에 접근 한 다음, "범위 확인(Range Check)"을 스크롤 다운하여 클릭한다.
• SPEKTRUM DX6i 및 ORX T-SIX의 송신기 경우, "설정 목록(Setup list)"에 액세스 할 수 있도록 시스템에 전원이 켜지는 동안 스크롤 휠을 아래로 스크롤하고 다시 클릭합니다.
3. 송신기의 상단에 있는 "트레이너 / 바인딩(Trainer/Bind)"버튼을 누릅니다. 이것은 출력 신호의 전력 저하를 초래할 것입니다.
4. 당신의 ELEV-8 의 완전한 제어를 이 거리에서 할 수 있어야 합니다. 당신은 바닥 아래 왼쪽에서 오른쪽으로 왼쪽 스틱을 움직여서 모델을 무장 / 무장해제 할 수 있어야 합니다. 당신이 완벽하게 제어 할 수 없는 경우, 모델은 비행하지 않습니다! 시스템의 일부 구성 요소가 제대로 작동하지 않습니다 그리고 당신은 문제 해결을 시작해야 합니다.
38 단계 : 프로펠러 어댑터를 모터에 연결
프로펠러 어댑터는 프로펠러를 쉽게 연결하고 제거할 수 있도록 합니다. 그리고 그들이 모터 중심으로 유지되도록 확인합니다.
필요 도구
• # 1 필립스 헤드 드라이버
필요 부품
• ELEV-8 조립 단계 37에서 제조
• 16 - 플랫 헤드 십자 나사 (M2)의 x12mm는, 각각의 모터에 포함
• 4 - 각각의 모터에 포함된 프로펠러 어댑터,
지시사항들
1. 각 프로펠러 어댑터 상부로 부터 와셔 및 너트를 제거하고 다음 단계에 사용하도록 남겨둔다.

2. 모터의 상부 위에 프로펠러 어댑터를 배치하고, 모터와 나사 구멍을 정렬한다.

3. 드라이버와 모터에 프로펠러 어댑터를 확보하기 위해 제공된 나사를 사용합니다. 당신이 저항을 느끼기 시작 때까지 각 나사를 조이고, 1/8 턴을 더 돌립니다.
4. 나머지 세 개의 모터에 대해 반복합니다.
39 단계 : 프로펠러 어댑터에 프로펠러 장착
이것입니다. 당신은 그것을 해냈습니다. 남아 있는 모든 것은 올바른 위치에 프로펠러를 부착하는 것입니다. (# 1 가장 일반적인 실수)
경고! 프로펠러는 날카로운 때문에 취급에 주의.
필요 도구
• 5/16 "렌치, 5/16"소켓, 또는 조절 렌치
• 펜치
필요 부품
• 4 - 프로펠러 어댑터 너트
• 4 - 프로펠러 어댑터 와셔
• 2 - 1045C (시계 반대 방향) 프로펠러 (# 721-80000)
• 2 - 1045CR (시계 방향) 프로펠러 (# 721-80001)
• 4 - 프로펠러 스페이서 링, 각각의 프로펠러 (아래 조립 도면 # 5)에 포함
지시사항들
1. 프로펠러 가방에서 스페이서 링을 제거하고 각 프로펠러 어댑터 샤프트를 통해 아래 그림에 표시된 하나를 배치합니다.

2. 모터 # 1번에 1045C의 프로펠러를 연결합니다. 아래 그림과 같이 프로펠러의 중심 가까이의 작은 글자가 수직이 되도록 어댑터 위에 프로펠러를 놓습니다. (프로펠러의 날카로운 가장자리가 아래에 있어야 합니다.) 평평한 쪽이 아래로 향하도록 프로펠러 위에 와셔를 놓습니다. 너트를 어댑터 사이로 넣고, 와셔와 어댑터가 접촉될 때까지 단단하게 조입니다. 그리고 나서 1/4 바퀴를 더 돌립니다

3. 동일한 과정을 사용하여, 1045C 프로펠러를 모터 #3에 부착합니다. 1045CR 프로펠러는 # 2, # 4모터에 연결합니다.



